AX-Series Motion Controller Instructions Manual Chapter 2
175
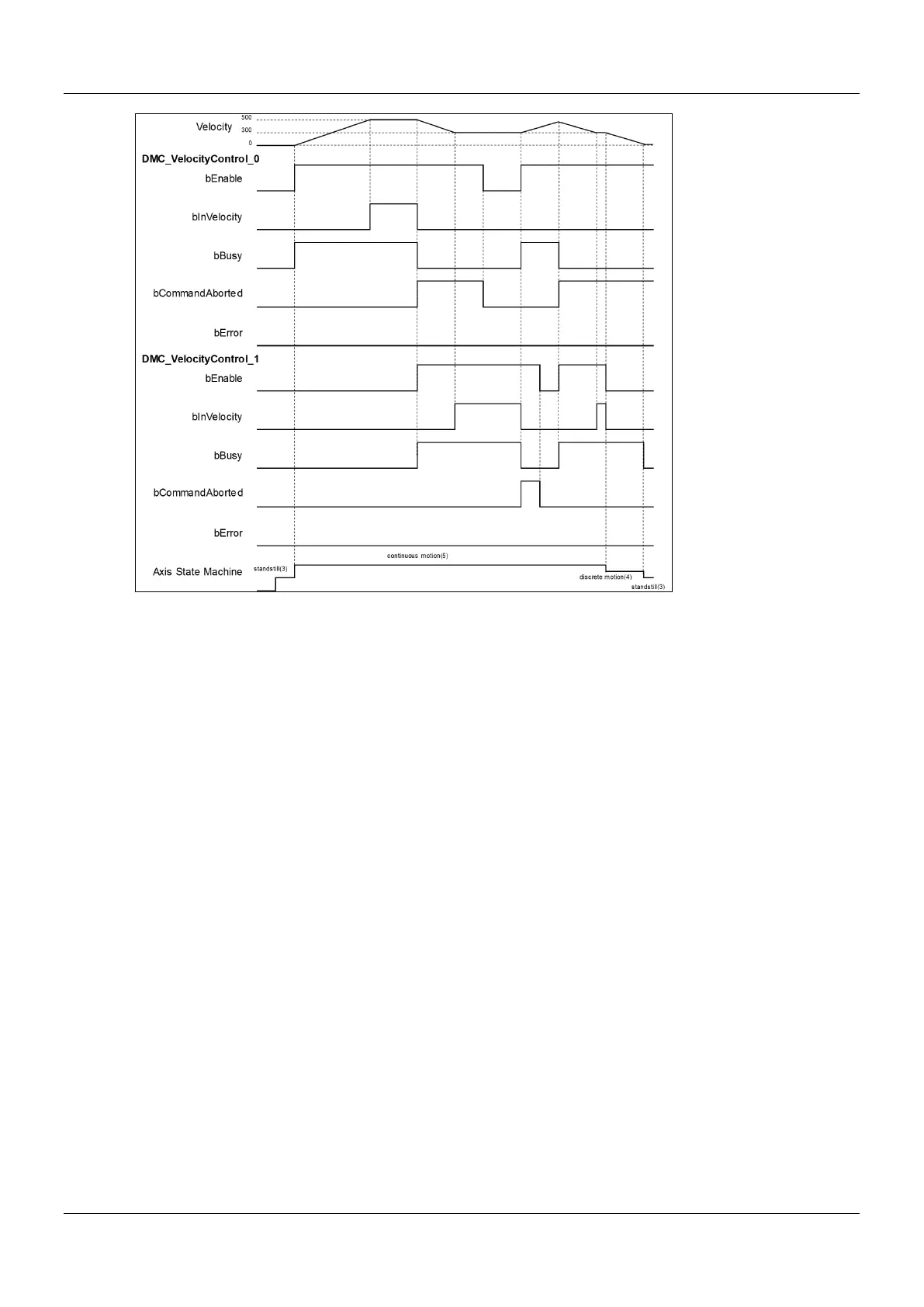
When bEnable of DMC_VelocityControl_0 changes to True, the instruction controls the axis to reach the
specified target velocity 500. When it reaches 500, bInVelocity of DMC_VelocityControl_0 changes to True.
When bEnable of DMC_VelocityControl_1 changes to True, DMC_VelocityControl_0 is interrupted and
bInVelocity of the instruction changes to False and bCommandAborted changes to True.
The DMC_VelocityControl_1 instruction decelerates the axis to the velocity 300. When 300 is reached,
bInVelocity of DMC_VelocityControl_1 will change to True and remain in this status as long as the velocity is
not changed.
When bEnable of DMC_VelocityControl_0 changes to False, bCommanAborted changes to False.
When DMC_VelocityControl_0 has started again through changing bEnable of DMC_VelocityControl_0 to
True, DMC_VelocityControl_0 will be aborted and the axis will accelerate to 500.
If bEnable of DMC_VelocityControl_1 changes from False to True again when the target velocity of
DMC_VelocityControl_0 has not been reached yet, DMC_VelocityControl_0 will be aborted. In this case, the
axis will decelerate again without reaching the target velocity 500 of DMC_VelocityControl_0.
bInVelocity of DMC_VelocityControl_1 changes to True when the target velocity of DMC_VelocityControl_1 is
reached.
When bEnable of DMC_VelocityControl_1 changes to True in the next cycle, the axis starts to decelerate to a
stop and then bBusy of DMC_VelocityControl_1 changes to False.
 Loading...
Loading...

