AX-Series Motion Controller Instructions Manual Chapter 2
2-255
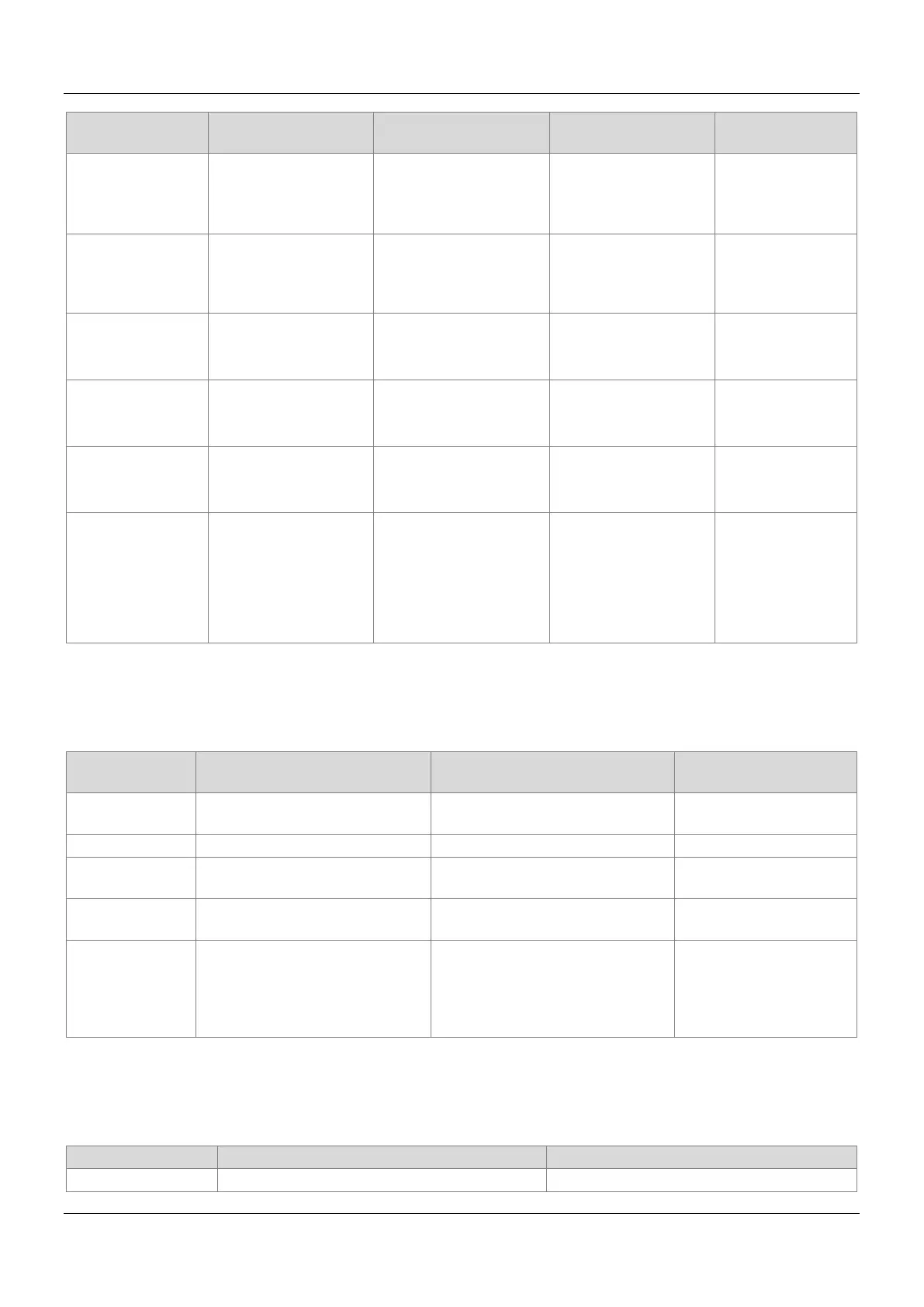
Name Function Data Type
Setting Value (Default
Timing to Take
Backward
Run the reverse jog of
each coordinate axis
BOOL[6]
[_,_,_,_,_,_]
True/False
([_,_,_,_,_,_]
False)
Only works when
Enable=True
MaxDistance
Set the maximum
moving distance of one
jog of each coordinate
axis
LREAL[6]
[_,_,_,_,_,_]
positive, negative or 0
([0,0,0,0,0,0])
Only works when
Enable=True
Velocity
Set the maximum
speed of each
coordinate axis inching
LREAL[6]
[_,_,_,_,_,_]
Positive
([0,0,0,0,0,0])
Only works when
Enable=True
Acceleration
Set the maximum
acceleration of each
coordinate axis inching
LREAL[6]
[_,_,_,_,_,_]
Positive
([0,0,0,0,0,0])
Only works when
Enable=True
Jerk
Set the maximum jerk
of each coordinate axis
inching
LREAL[6]
[_,_,_,_,_,_]
Positive
([0,0,0,0,0,0])
Only works when
Enable=True
CoordSystem Coordinate system DMC_COORD_SYSTEM
1: MCS
2: WCS (Reserved)
3: PCS_1 (Reserved)
4: PCS_2 (Reserved)
5: TCS (Reserved)
(0)
Only works when
Enable=True
*Note: DMC_COORD_SYSTEM: Enumeration (Enum)
Outputs
Name Function Data Type
Output Range Value
bValid
True when the Instruction is
triggered to execute
BOOL True/False (False)
bBusy True when inching is run BOOL True/False (False)
Aborted
True when the Instruction is
BOOL True/False (False)
bError
True when an Instruction error
occurs
BOOL True/False (False)
ErrorID
Record the error code when the
instruction error occurs. For the
detailed description of the error
code, refer to the appendix of the
manual.
DMC_ERROR
*
DMC_ERROR
(DMC_NO_ERROR)
*Note: DMC_ERROR: Enumeration (Enum)
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bValid When bEnable turns to True.
bEnable
 Loading...
Loading...

