AX-Series Motion Controller Instructions Manual Chapter 2
424
Name Function Data Type Output Range (Default)
bInVelocity
True when the target
velocity is reached.
BOOL True/False (False)
bBusy
True when the instruction is
run.
BOOL True/False (False)
bCommandAborted
True when the instruction is
interrupted.
BOOL True/False (False)
bError True when an error occurs. BOOL True/False (False)
ErrorID
Indicates the error code if
an error occurs. Refer to
Appendix for error code
DML_ERROR* DML_ERROR (DML_NO_ERROR)
*Note: DML_ERROR: Enumeration (ENUM)
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bInVelocity
When the target velocity is reached.
When bCommandAborted turns to True.
When bExecute turns to True again and
lrVelocity value is changed.
bBusy
When bExecute turns to True and the
instruction is run.
When bError turns to True.
When bCommandAborted turns to True.
bCommandAborted
When this instruction is aborted by
another instruction.
When the instruction is aborted by
MC_Stop_DML.
When bExecute turns to False.
If bExecute is False and
bCommandAborted is True,
bCommandAborted will immediately
change to False after maintaining a True
state for a scan cycle.
When an error occurs in the execution
conditions or input values for the
instruction.
When bExecute turns to False. (Error Code
is cleared)
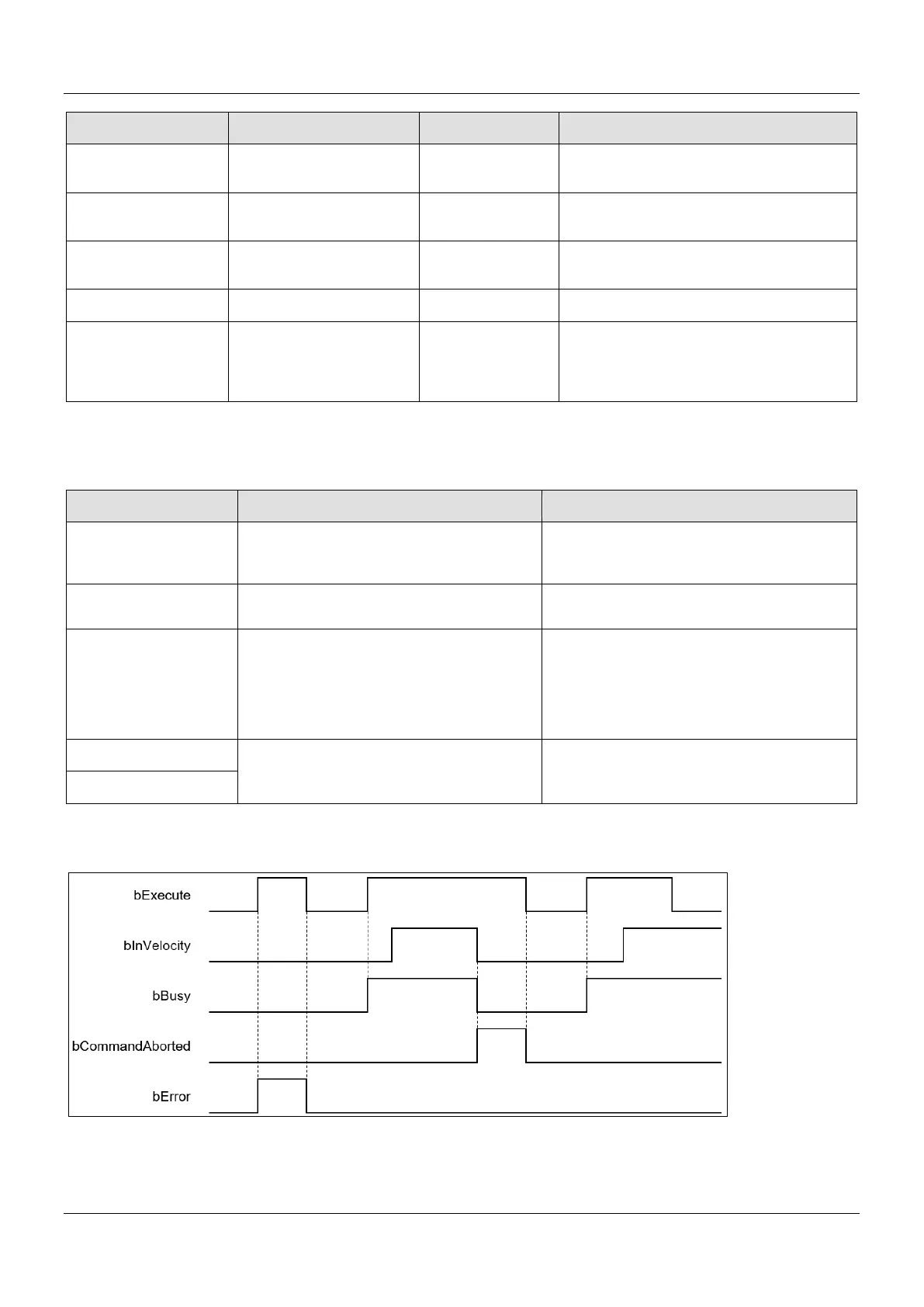
Timing Diagram
Inputs/Outputs
 Loading...
Loading...

