Setup & Operation 3. Environments and Installation
28 VT Rev.1
3.5 Installation Procedure
The installation shall be made by qualified installation personnel and should conform to all
national and local codes.
WARNING
■
safeguard must be installed for the robot system. For details
on the safeguard, refer to the Installation and Design Precautions in the Safety
chapter of the EPSON RC+ User’s Guide.
Install the Manipulator in a location with sufficient space so that a
piece does not touch a wall or a safeguard when the Manipulator extends its arm
fully while holding a work piece. Installing the Manipulator at a location with
insufficient space is extremely hazardous and may result in serious bodily inju
and/or severe equipment damage to the robot system as a tool or a work piece
may collide with a wall or a safeguard.
Anchor the Manipulator before turning ON the power or operating the
Manipulator. Turning ON the power or operating the Manipulator that is not
anchored is extremely hazardous and may result in serious bodily injury and/or
severe equipment damage to the robot system as the Manipulator may fall down.
Before installing and operating the Manipulator, make sure that all parts of the
Manipulator are in place and have no external defects. Missing or defective
parts may cause improper operation of the
Manipulator. Improper operation of
the Manipulator is extremely hazardous and may result in serious bodily injury
and/or severe equipment damage to the robot system.
Manipulator must be installed to avoid interference with buildings, structures,
machines and equipment that may create a trapping hazard or
(resonance) may occur during operation depending on rigidity of the
occurs, improve rigidity of the table or change the speed or
acceleration and deceleration settings.
Table Top Mounting Manipulator with two or more people.
ts are as follows. Be careful not to get hands, fingers, or
feet caught and/or have equipment damage
d by a fall of the Manipulator.
VT6-A901* : Approx. 40 kg: 89 lb.
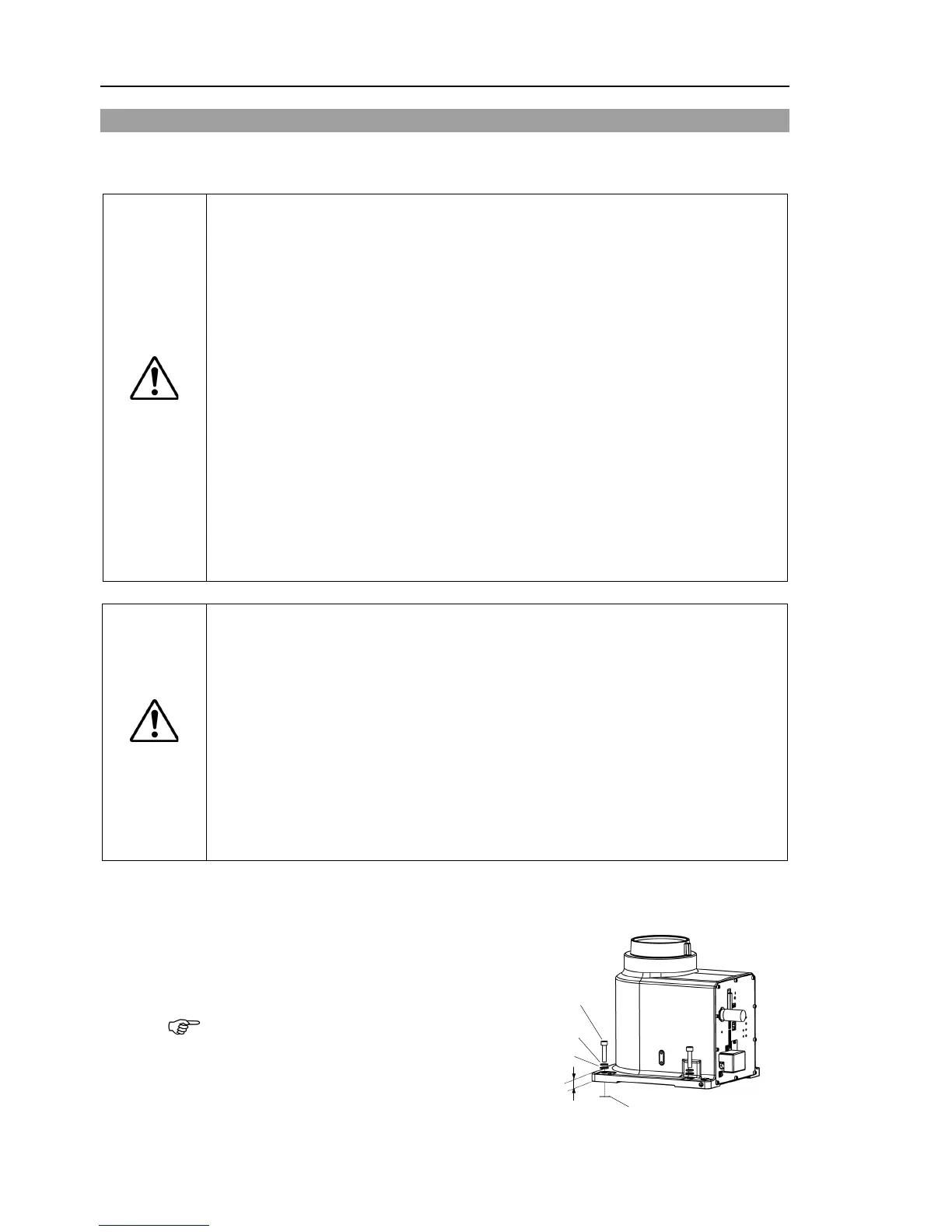
Mounting bolt
For the dimensions, refer to Setup & Operation 3.3 Mounting Dimensions.
There are four threaded holes for the
Manipulator base
mounting bolts conforming to the
strength of
ISO898-1 property class 10.9
.0 ± 1.6 N·m (314 ± 16 kgf·cm)
Screw Hole (depth 18 mm or more)
 Loading...
Loading...









