IS620P User Manual Chapter 6 Troubleshooting
- 133 -
17. Er.234: Runaway
Cause:
•
The torque reference direction is reversed to the speed feedback direction in the torque
control mode.
•
The speed feedback is reversed to the speed reference direction in the position or speed
control mode.
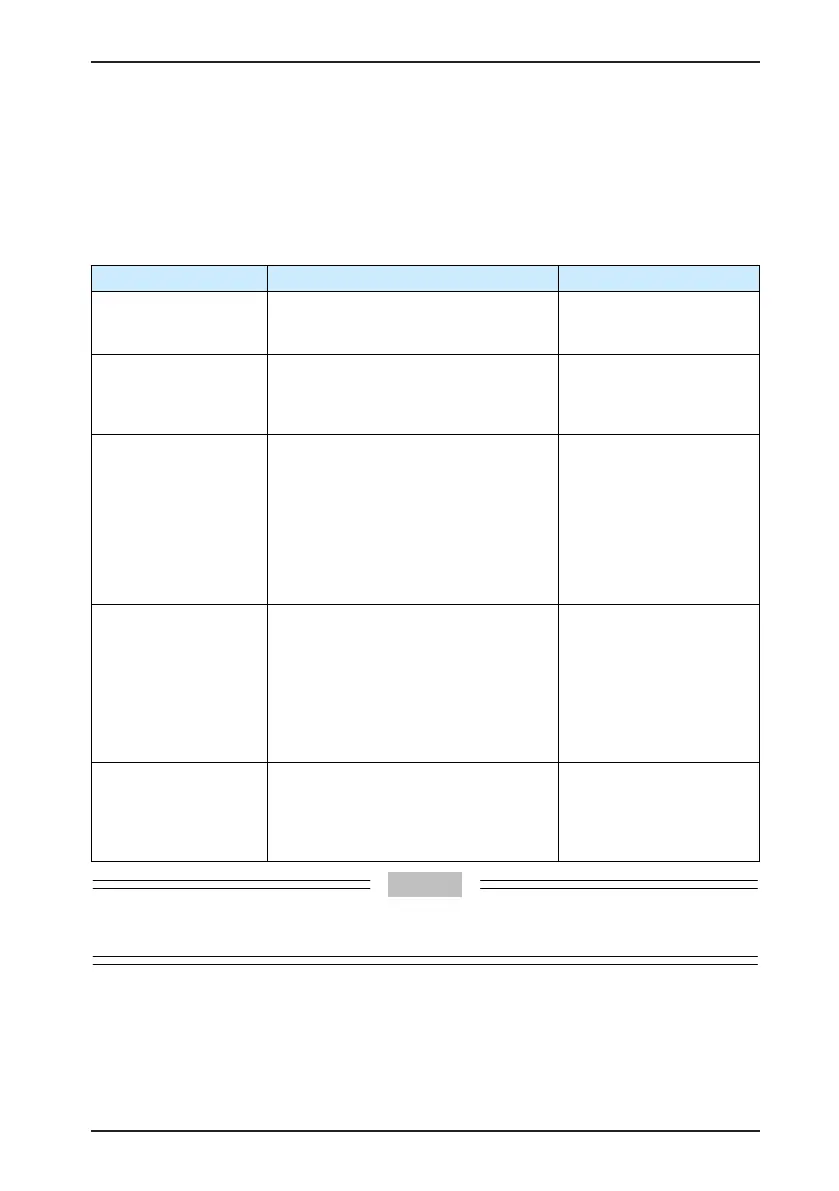
Cause Conrming Method Corrective Action
1. The UVW phase
sequence is incorrect.
•
Check whether the UVW phase
sequence on the servo drive side is
consistent with that on the motor side.
Connect the UVW cables
according to the correct
phase sequence.
2. The motor rotor
initial phase detection
is incorrect due to
interference at power-on.
•
The UVW phase sequence is correct.
But Er.234 is reported once the servo
drive is enabled.
Re-power on the servo
system.
3. The encoder type is
set incorrectly or the
wiring is incorrect.
•
Check that the equipments you are
using are the IS620P series servo
drive and 20-bit servo motor (-U2***) of
Inovance based on the nameplate of
the servo drive and motor.
Replace the unmatched
servo drive or motor. If you
use the IS620P series servo
drive and 20-bit servo motor
(-U2***) of Inovance, ensure
that H00-00 = 14000. Re-
conrm the motor model,
encoder type and encoder
wiring.
The cable wiring is
incorrect. The cable is
aging, corrosive or is
connected loosely.
•
Check whether the cable you use is
standard conguration of Inovance and
whether the cable is aged, corroded or
loose.
•
Set the servo enabled signal to OFF
and rotate the motor shaft manually.
Check whether H0B-10 (rotation angle)
changes as the motor rotates.
Re-weld, fasten or replace
the encoder cable.
5. On the working
condition of controlling a
vertical shaft, the gravity
load is too large.
•
Check whether the load of the vertical
shaft is too large. Adjust the braking
parameters H02-09 to H02-12 and then
see whether the fault is eliminated.
Reduce the load of the
vertical shaft, improve the
rigidity or shield this fault
in the prerequisite of not
affecting the safety and use.
On the working condition of controlling a vertical shaft or one motor dragging the other, set H0A-12 =
0 to shield the runaway fault.

 Loading...
Loading...
