Chapter 6 Troubleshooting IS620P User Manual
- 140 -
23. Er.510: Pulse output overspeed
Cause:
•
When the pulse output function is used (H05-38 = 0 or 1), the output pulse frequency
exceeds the frequency upper limit allowed by the hardware (2 MHz).
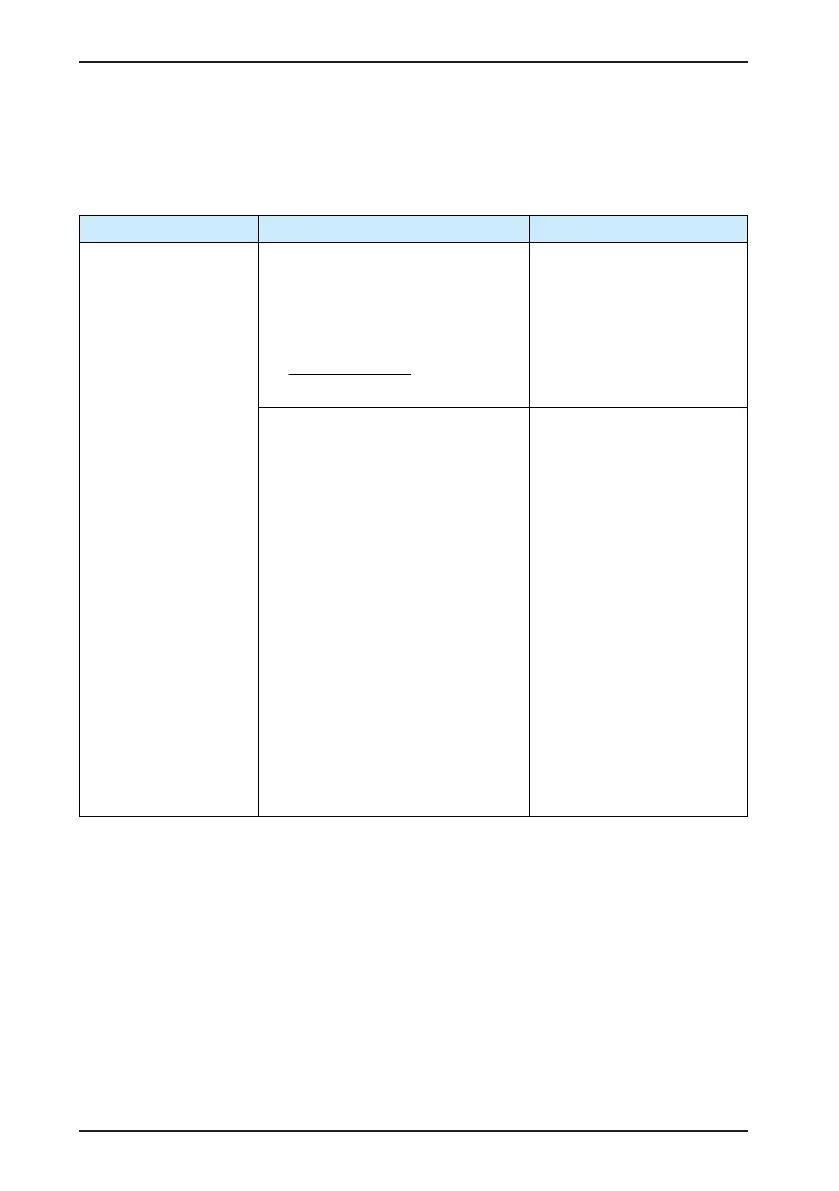
Cause Conrming Method Corrective Action
The output pulse
frequency exceeds the
frequency upper limit
allowed by the hardware
(2 MHz).
•
When H05-38 = 0 (encoder
frequency-division output), calculate
the corresponding frequency-division
pulse frequency exceeds the limit.
Output pulse frequency (Hz) =
Motor speed (rpm)
60
x
H05-17
Decrease H05-17(encoder
frequency-division pulses),
making the output pulse
frequency below the frequency
upper limit allowed by the
hardware in the speed range
required by the mechanical
condition.
•
H05-38 = 1 (reference pulse
synchronous output), the input
pulse frequency exceeds 2 MHz
or interference exists on the pulse
input pin.
Low-speed pulse input pin:
Differential input terminals:
PULSE+, PULSE-, SIGN+, SIGN-
Max. pulse frequency: 500 kpps
Open-collector input terminals:
PULLHI, PULSE+, PULSE-, SIGN+
and SIGN-
Max. pulse frequency: 200 kpps.
High-speed pulse input pin:
Differential input terminals:
HPULSE+, HPULSE-, HSIGN+,
HSIGN-
Max. pulse frequency: 4 Mpps.
Decrease the input pulse
frequency to within the
frequency upper limit allowed
by the hardware.
■ Note:
In this case, if you do not
modify the electronic gear
ratio, the motor speed will
slow down.
If the input pulse frequency
is very high but is still within
the frequency upper limit
allowed by the hardware,
take anti-interference
measures (use STP cable
for pulse input and set the
pin lter parameters H0A-24
or H0A-30), which prevents
interference pulse adding
to the pulse reference and
resulting in fault misreported.
24. Er.602: Internal fault
25. Er.610: Servo drive overload
Cause:
•
The heat accumulation of the servo drive reaches the fault level.

 Loading...
Loading...
