Chapter 6 Troubleshooting IS620P User Manual
- 148 -
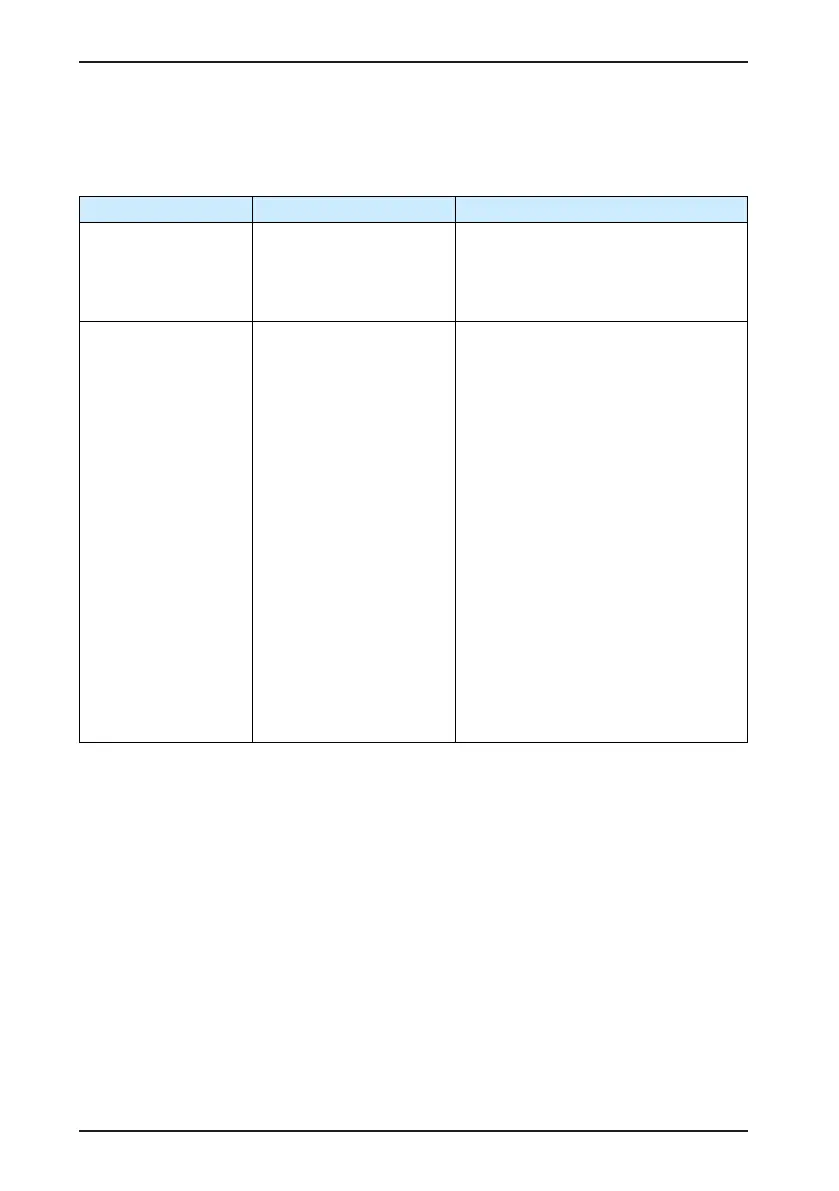
36. Er.B01: Pulse input abnormal
Cause:
•
The input pulse frequency is greater than H0A-09 (Maximum position pulse frequency).
Cause Conrming Method Corrective Action
1. The input pulse
frequency is greater
than H0A-09 (Maximum
position pulse
frequency).
•
Check whether H0A-09
is smaller than maximum
input pulse frequency
required by normal
machine running.
Reset H0A-09 correctly according to the
actual requirement.
2. The input pulse
suffers interference.
•
Check whether the
position reference
increases abruptly or
whether H0B-13 (input
reference pulse counter)
is larger than the number
of pulses output by the
host computer through
the oscilloscope function
of the drive debugging
platform of Inovance.
•
Then check the grounding
situation of the connecting
cables.
1. First, use an STP cable for pulse input
and separate the pulse input cable from
the servo drive power cables.
2. Then, when differential input is selected
on the condition of using low-speed
pulse input terminal (H05-01 = 0), the
ground of the host computer must
be connected to GND of the servo
drive reliably. If open-collector input
is selected, the ground of the host
computer must be connected to COM
of the servo drive reliably.
Only differential input can be selected
on the condition of using high-speed
pulse input terminal (H05-01 = 1), the
ground of the host computer must be
connected to GND of the servo drive
reliably.
3. Finally, according to the selected
hardware input terminal, increase the
pin lter time of the pulse input terminal
through H0A-24 or H0A-30.
37. Er.B03: Electronic gear ratio setting exceeding the limit
Cause:
•
Any electronic gear ratio exceeds the limit: 0.001 x encoder resolution/10000, 4000 x
encoder resolution/10000.

 Loading...
Loading...
