145
4. Calculate the PID parameters:
• Proportional Band P.B. value
Peak
P.B. =
x 100
V
max
- V
min
where V
max
- V
min
is the scale interval.
• Integral Time value It = 1.5 x T
• Derivative Time value dt = It / 4
5. Switch the controller to manual.
6. Set the calculated parameters (re-enable PID control by
setting a cycle time for relay output if necessary).
7. Switch to automatic.
8. To check optimization of the parameters, change the
setpoint value if possible and check transitory behavior:
if oscillation persists, increase the Proportional Band
value; on the other hand, if the response is too slow,
decrease the value.
5.10.3. Self-Tuning
Self-Tuning is a simplified and automatic tuning mode based
on the process state.
The purpose of Self-Tuning is to calculate optimum control
parameters at the start of the process.
The variable (for example, temperature) must be the one me-
asurable at zero power (room temperature).
You can automatically start tuning at every power-on or start
it by means of the appropriately configured ( ) key.
The procedure runs automatically by optimizing the approa-
ch in relation to the real temperature value, in case of (relay,
solid-state, Triac) control output, with automatic calculation
of optimal cycle time CY.TIM.
At the end of the procedure, the following new PID parame-
ters are saved:
• proportional band,
• integral and derivative times, calculated for the cur-
rent action (heat or cool).
In case of dual action (heat + cool) the parameters are
calculated automatically separately for the two actions.
Active tuning condition is signaled on the display by an LED
Attention! Self-Tuning is not applicable with an
ON/OFF control.
Notes
• For the programmer model, if Self-Tuning starts when
the controller is powered-on, the program is in STOP.
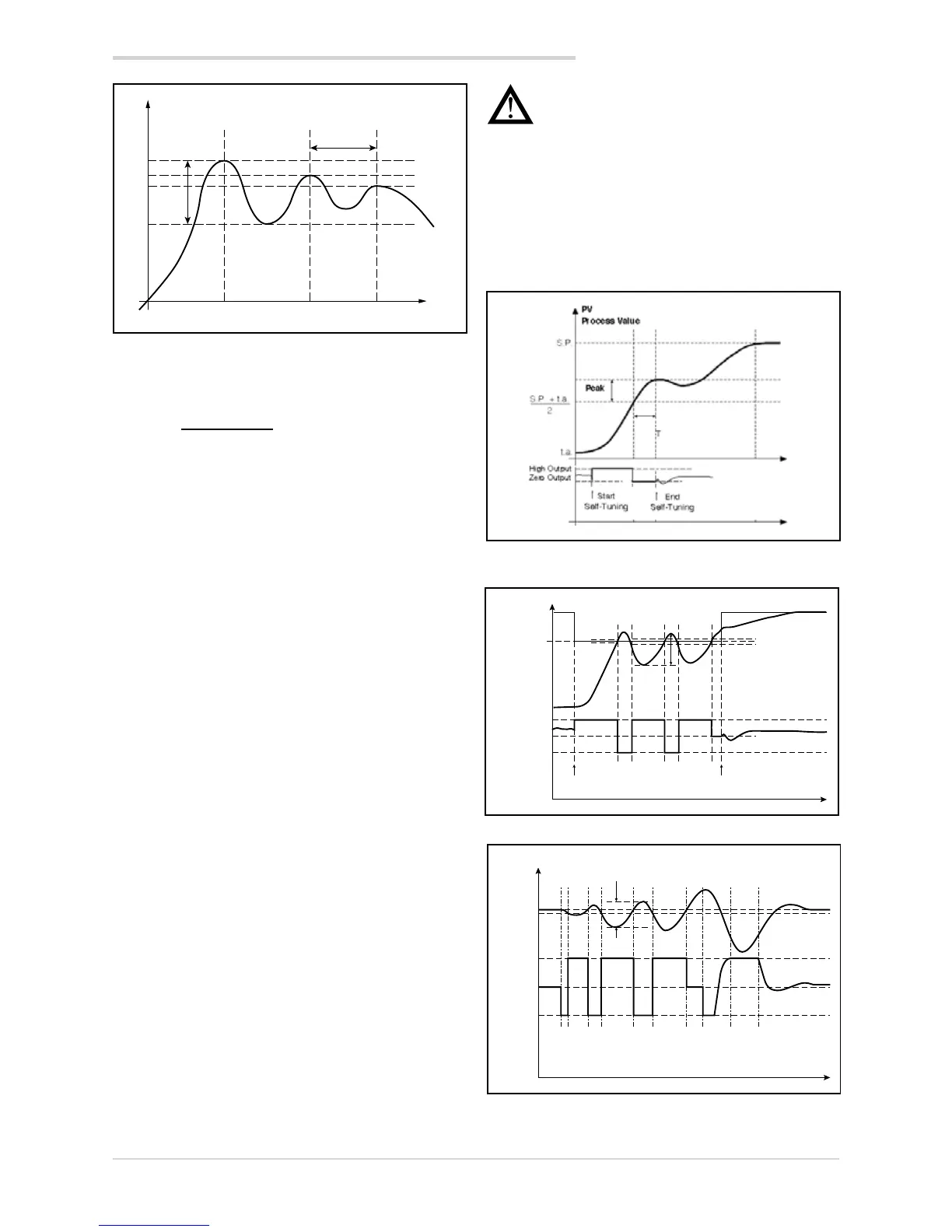
• If SP-PV deviation is less than 0.3% f.s., Self-Tuning
switches to “one shot” Auto-Tuning; otherwise it calcu-
lates a point at 75% of deviation around which to start
“one shot” Auto-Tuning, considering a single Heat or
Cool action or a dual Heat/Cool action based on the
type of set control.
Example single action, PV less SP/4
Example dual heat/cool action, PV greater than SP/4
Example with SP-PV deviation less than 0.3% f.s. dual
heat/cool action
5. Examples and applicative notes
Variabile di
processo
Tempo
Picco
T
Time
Process variable
Peak
Target
Set point
Peak to
Peak
High
Output
A B
A: Start of Autotune B: End of Autotune
Zero
Output
Low
Output
Target
Set point
First
overshoot
Peak to
Peak
Tune Target
Point
High Output
Start
Self-Tuning
End
Self-Tuning
Zero Output
Low Output
±2%f.s.
±1%f.s.

 Loading...
Loading...







