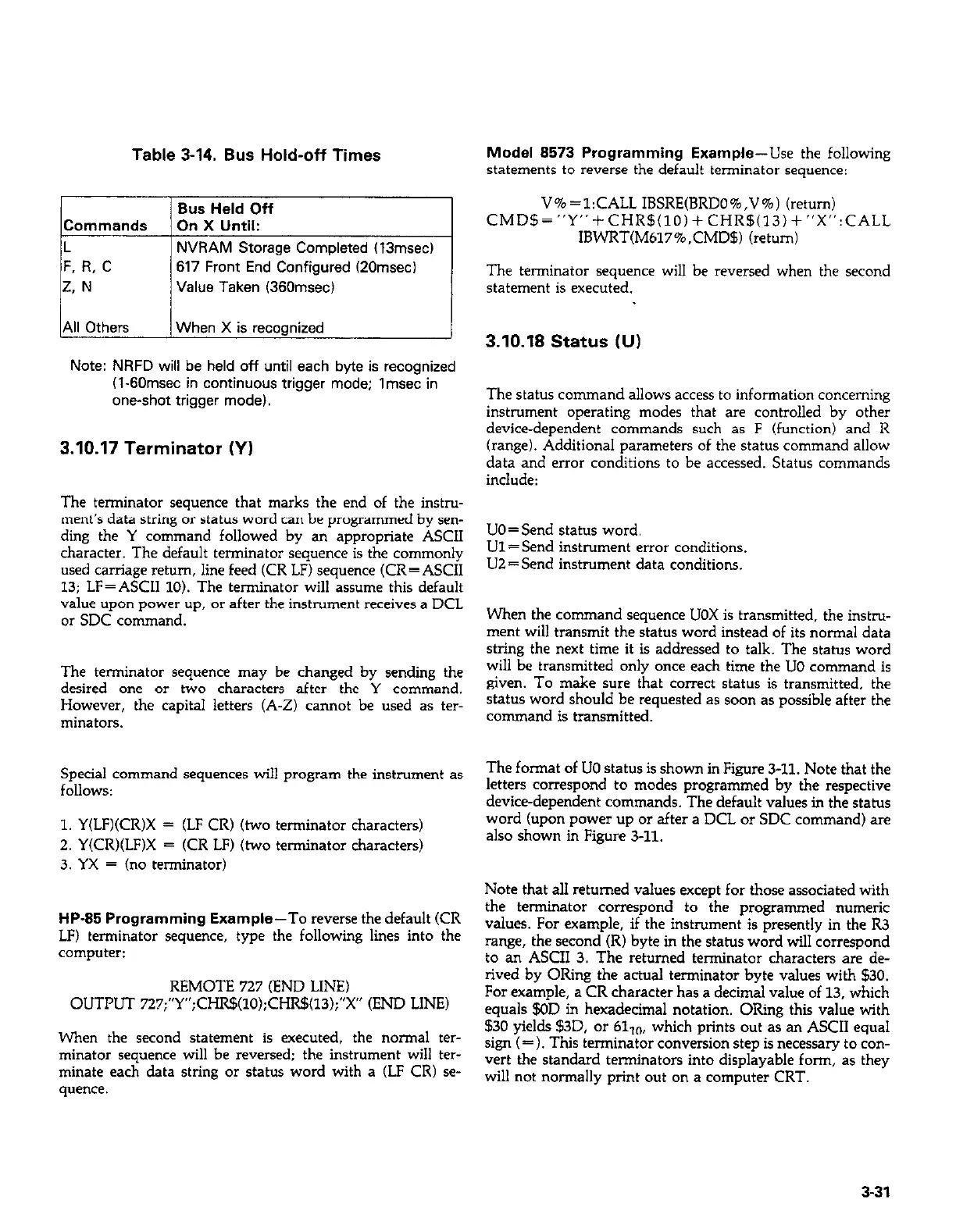
Table 3-14. Bus Hold-off Times
Model 8573 Programming Example-Use the following
statements to reverse the default terminator sequence:
Bus Held Off
V%=l:CALL IBSRE(BRDO%,V%) (return)
Commands On X Until:
CMD!§=“Y”+CHR$(lO)+CHR$(13)+“X”:CALL
L
NVRAM Storage Completed (13msec)
IBWRT(M617%,CMD$) (return)
F. R, C
617 Front End Configured (20msecl
2. N
Value Taken (36Omsec)
The terminator sequence will be reversed when the second
statement is executed.
All Others
When X is recognized
3.10.18 Status NJ)
Note: NRFD will be held off until each byte is recognized
(1.60msec in continuous trigger mode; Imsec in
one-shot trigger model.
The status command allows access to information concerning
instrument ooeratinz modes that are controlled bv other
device-dependent c&mands such as F (functionj’and R
3.10.17 Terminator (Y)
(range). Additional parameters of the status command allow
data and error conditions to be accessed. Status commands
include:
The terminator sequence that marks the end of the instru-
ment’s data string or status word can be programmed by sen-
ding the Y command followed by an appropriate ASCII
UO=Send status word.
character. The default terminator sequence is the commonly
Ul=Send instrument error conditions.
used carriage return, line feed (CR LF) sequence (CR=ASCII
UZ=Send instrument data conditions.
13: LF=ASCII 10). The terminator will assume this default
value upon power’up, or after the instrument receives a DCL
or SDC command.
When the command sequence UOX is transmitted. the instru-
ment will transmit the status word instead of its normal data
string the next time it is addressed to talk. The status word
The terminator sequence may be changed by sending the
will be transmitted only once each time the UO command is
desired one or two characters after the Y command.
given. To make sure that correct status is transmitted, the
However, the capital letters (A-Z) cannot be used as ter-
status word should be requested as soon as possible after the
minators.
command is transmitted.
Special command sequences will program the instrument as
The format of UO status is shown in Figure 3-11. Note that the
follows:
letters correspond to modes programmed by the respective
device-dependent commands. The default values in the status
1. Y(LF)(CR)X = (LF CR) (two terminator characters)
2. Y(CR)(LF)X = (CR LF) (two terminator characters)
word (upon power up or after a DCL or SDC command) are
also shown in Figure 3-11.
3. YX = (no terminator)
Note that al1 returned values except for those associated with
HP-85 Programming Example-To reverse the default (CR
the terminator correspond to ihe programmed numeric
LF) terminator sequence, type the following lines into the
values. For example, if the instrument is presently in the R3
computer:
range, the second (R) byte in the statLls word will correspond
to an ASCII 3. The returned terminator characters are de-
REMOTE 727 (END LINE)
rived by ORing the actual terminator byte values with $30.
OUTPUT 727;“Y”;CHR$(lO);CHR!§(l3);“X” (END LINE)
For example, a CR character has a decimal value of 13, which
equals $OD in hexadecimal notation. ORing this value with
When the second statement is executed, the normal ter-
$30 yields $3D, or 6110, which prints out as an ASCII equal
minator sequence will be reversed; the instrument will ter-
sign (= ). This terminator conversion step is necessary to con-
minate each data string or status word with a (LF CR) se-
vert the standard terminators into displayable form, as they
will not normally print out on a computer CRT.
quence.
3-31