Parameter Name / value range / [default seng] Info
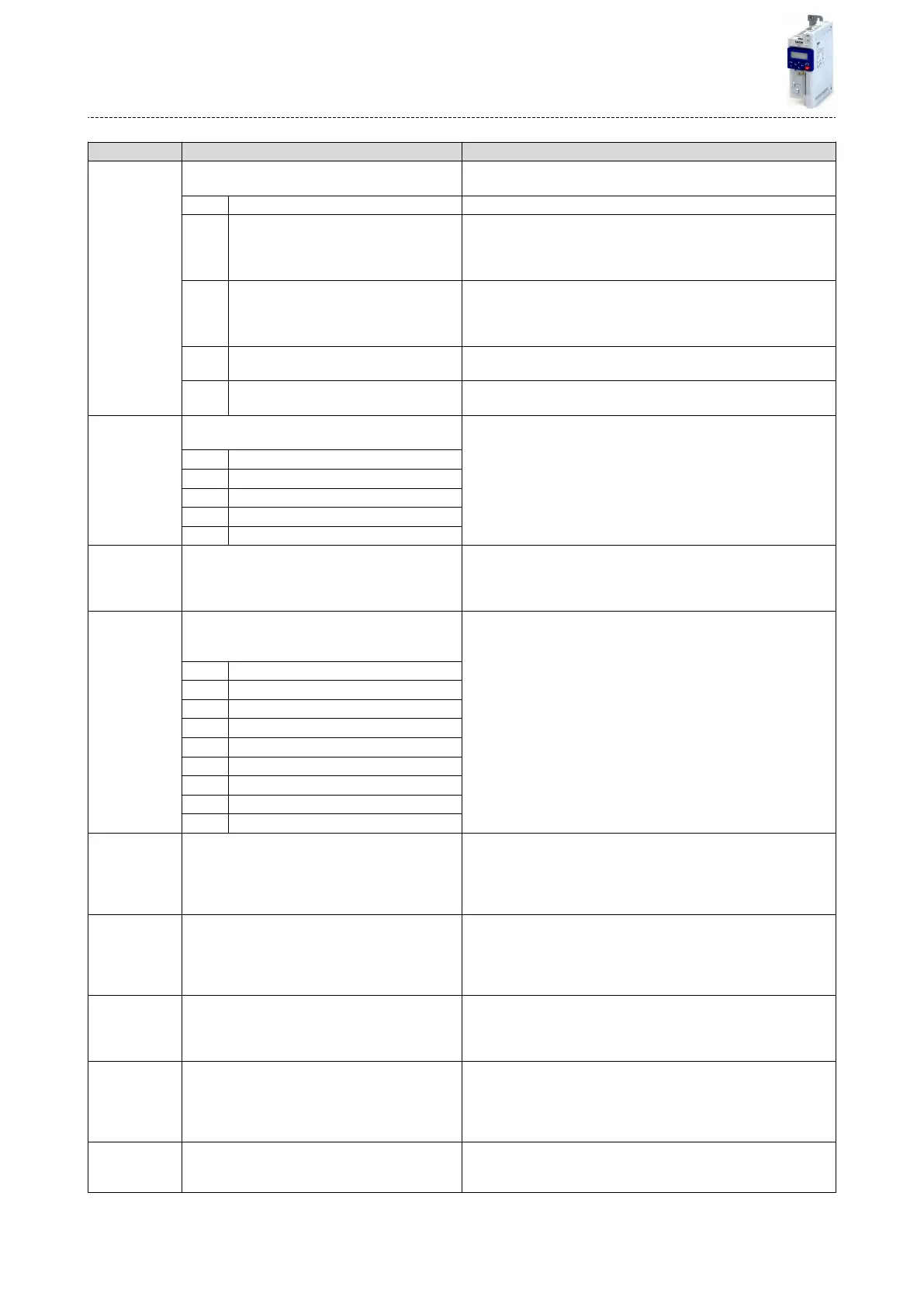
0x4020:001
(P600.01)
Process controller setup (PID): Operang mode
(PID setup: Operang mode)
Selecon of the process controller operang mode.
0 Inhibited Process controller deacvated.
1 Normal operaon The setpoint is higher than the fed back variable (actual value). If the sys-
tem deviaon increases, the motor speed is increased.
Example: pressure-controlled booster pumps (increase in the motor
speed produces an increase in pressure.)
2 Reverse operaon The setpoint is lower than the fed back variable (actual value). If the sys-
tem deviaon increases, the motor speed is increased.
Example: temperature-controlled cooling water pump (increase in motor
speed produces decrease in temperature.)
3 Normal bi-dreconal The direcon of rotaon corresponds to the sign of the system devia-
on. If the system deviaon increases, the motor speed is increased.
4 Reverse bi-direconal A negave system deviaon causes a posive direcon of rotaon. If the
system deviaon increases, the motor speed is increased.
0x4020:002
(P600.02)
Process controller setup (PID): PID process variable
(PID setup: PID process var.)
Selecon of the source via which the feedback of the controlled variable
(actual value) for the process controller is eected.
1 Analog input 1
2 Analog input 2
3 DC-bus voltage (from version 02.00)
4 Motor Current (from version 02.00)
5 Network (from version 02.00)
0x4020:003
(P600.03)
Process controller setup (PID): Closed-loop controlled
speed range
(PID setup: PID speed range)
0 ... [100] ... 100 %
Seng of the maximum output frequency up to which the process con-
troller carries out regulaon.
•
100 % ≡ Maximum frequency 0x2916 (P211.00).
0x4020:004
(P600.04)
Process controller setup (PID): Speed feedforward
control source
(PID setup: PID line speed)
Oponal selecon of a speed feedforward control source for the process
controller.
•
Is advisable, for instance, for dancer posion controls if the motor
speed must not fall below line speed (process controller output value
= line speed + controlled motor speed).
•
Standard applicaons usually do not require a speed feedforward con-
trol; therefore it is deacvated in the default seng.
0 Without speed addion
1 Keypad frequency setpoint
2 Analog input 1
3 Analog input 2
4 Frequency preset 1
5 Frequency preset 2
6 Frequency preset 3
7 Frequency preset 4
8 Network
0x4020:005
(P600.05)
Process controller setup (PID): Min speed limit
(PID setup: Min speed lim)
-100.0 ... [-100.0] ... 100.0 %
•
From version 03.00
Conguraon of the process controller
•
100 % ≡ Maximum frequency 0x2916 (P211.00).
•
The limitaon becomes eecve aer the line speed has been added.
•
The value set here also limits the I component of the PID controller
(Integrator-An-Windup).
0x4020:006
(P600.06)
Process controller setup (PID): Max speed limit
(PID setup: Max speed lim)
-100.0 ... [100.0] ... 100.0 %
•
From version 03.00
Maximum output value of the process controller.
•
100 % ≡ Maximum frequency 0x2916 (P211.00).
•
The limitaon becomes eecve aer the line speed has been added.
•
The value set here also limits the I component of the PID controller
(Integrator-An-Windup).
0x4021:001
(P606.01)
PID speed operaon: Acceleraon me
(PID speed op.: Accel. me)
0.0 ... [1.0] ... 3600.0 s
Acceleraon me for (temporary) speed-controlled drive control in proc-
ess controller mode.
•
The acceleraon me takes eect at the output of the process con-
troller.
0x4021:002
(P606.02)
PID speed operaon: Deceleraon me
(PID speed op.: Decel. me)
0.0 ... [1.0] ... 3600.0 s
Deceleraon me for (temporary) speed-controlled drive control in
process controller mode.
•
The deceleraon me takes eect at the output of the process con-
troller.
•
Excepon: In case of quick stop, the quick stop delay me is eecve.
0x4048
(P601.00)
PID P-component
(PID P-component)
0.0 ... [5.0] ... 1000.0 %
Output frequency of the process controller per 1 % system deviaon.
•
100 % ≡ maximum frequency 0x2916 (P211.00).
Conguring the process controller
Basic process controller sengs
242
 Loading...
Loading...





