13.2.4 Example 4: Quick stop
This example illustrates the "quick stop" funcon. If quick stop is acvated, the motor is
brought to a standsll within the deceleraon me set in 0x291C (P225.00).
•
Switch S1 starts the motor in forward direcon of rotaon. Switch S1 in the inial posion
stops the motor again.
•
Switch S2 acvates the "quick stop" funcon.
Cancelling the quick stop causes a restart of the motor if "Run" is sll acve
(switch S1 closed)!
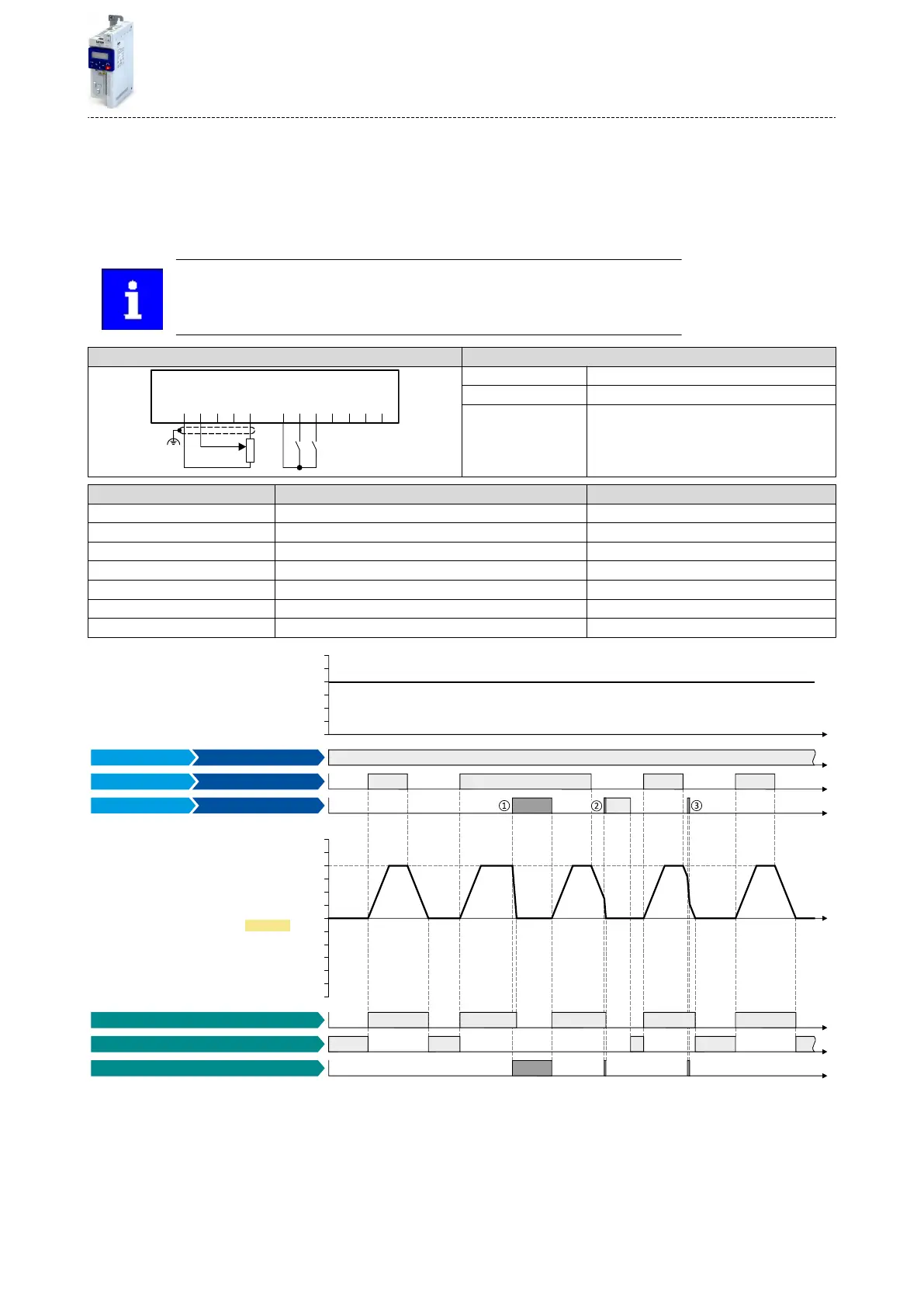
Connecon plan funcon
GND
AI1
AI2
AO1
10V
24V
DI1
DI2
DI3
DI4
DI5
DO1
X3
S1 S2
1k ...10k
0 ... 10 V
R1
Potenometer R1 Frequency setpoint selecon
Switch S1 Run
Switch S2 Acvate quick stop
Parameter Name Seng for this example
0x2631:001 (P400.01) Enable inverter Constant TRUE [1]
0x2631:002 (P400.02) Run Digital input 1 [11]
0x2631:003 (P400.03) Acvate quick stop Digital input 2 [12]
0x2631:004 (P400.04) Reset fault Not connected [0]
0x2917 (P220.00) Acceleraon me 1 3.0 s
0x2918 (P221.00) Deceleraon me 1 3.0 s
0x291C (P225.00) Quick stop deceleraon me 1.0 s
t
t
t
t
t
t
t
t
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
-40 Hz
-60 Hz
-50 Hz
-30 Hz
-20 Hz
-10 Hz
0x2DDD
Digital input 2 [12]
Digital input 1 [11]
Constant TRUE [1]
Stop active [53]
Quick stop active [54]
Running [50]
Output signals
Status signals
Output frequency
Activate quick stop
Run
Enable inverter
Input signals
Frequency setpoint selection
FunctionTrigger
The status signals can be assigned to digital outputs. 4Conguraon of digital outputs^ 415
①
If quick stop is acvated, the motor is decelerated to the frequency setpoint 0 Hz within a short period of me. The "Quick stop acve [54]"
status is set as long as quick stop is acvated. The "Stop acve [53]" status is not set.
②
An acve stop command is interrupted by a quick stop.
③
If quick stop is cancelled again before standsll is reached, stopping is connued with the stop method set in 0x2838:003 (P203.03). In the
example: Stop with standard ramp.
Flexible I/O conguraon
Start / stop motor
Example 4: Quick stop
361
 Loading...
Loading...





