Parameter Name / value range / [default seng] Info
0x6060
(P301.00)
Modes of operaon
(Modes of op.)
•
Seng can only be changed if the inverter is inhibi-
ted.
Selecon of the operang mode.
-2 MS: Velocity mode Vendor specic velocity mode
-1 MS: Torque mode (from version 03.00) Vendor specic torque mode
•
Only possible in motor control type 0x2C00 (P300.00) = "Sensorless
vector control (SLVC) [4]".
4Torque control w/ freq. limit ^ 153
0 No mode change/no mode assigned No operang mode (standsll)
2 CiA: Velocity mode CiA 402 velocity mode
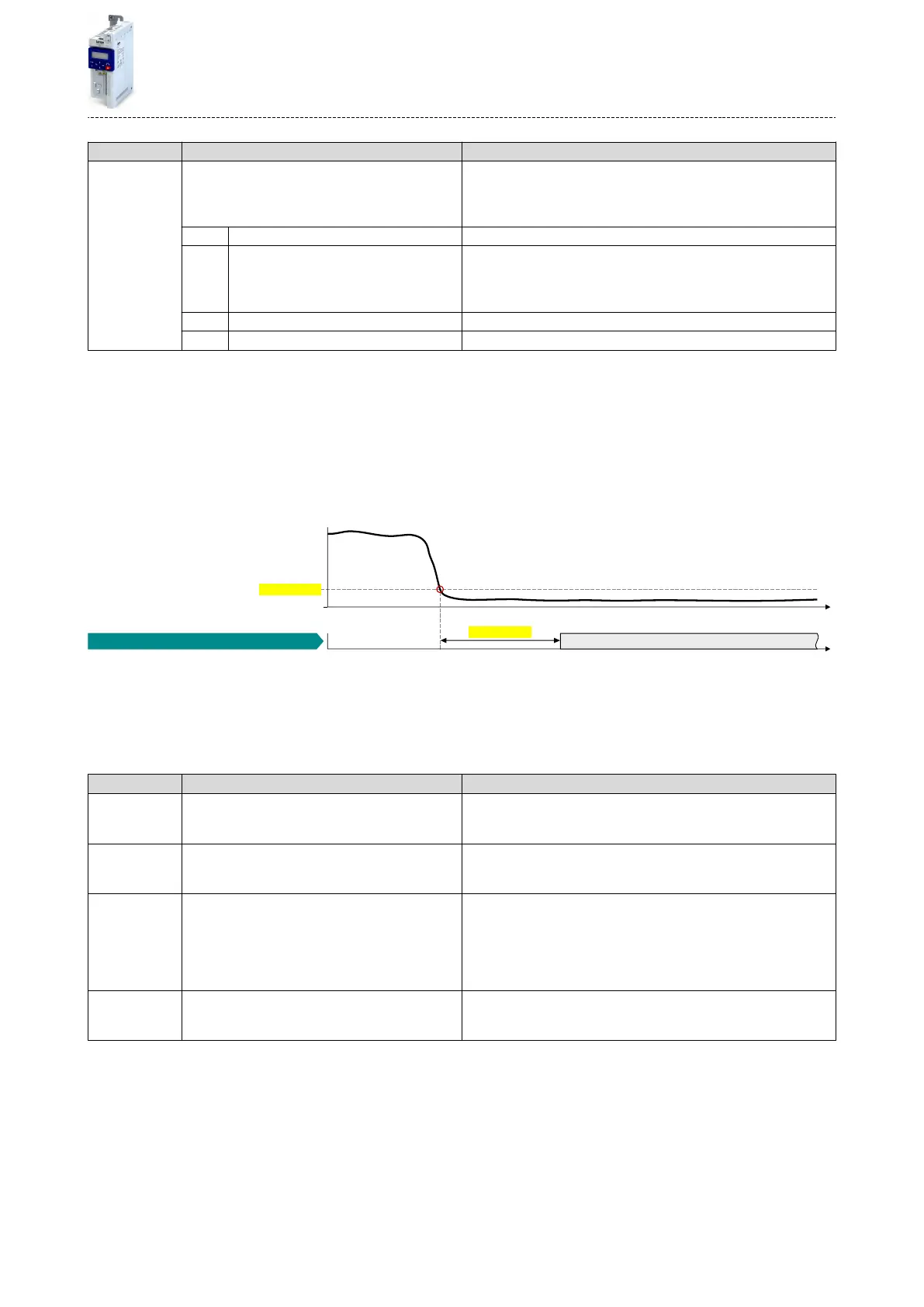
11.6 Load loss detecon
This funcon serves to detect a load loss during operaon and to then acvate a specic func-
on, for instance the switching of the relay.
Details
If, during operaon, the current motor current falls below the threshold set in 0x4006:001
(P710.01) for at least the me set in 0x4006:002 (P710.02), the internal status signal "Load
loss detected [83]" is set to TRUE:
0
t
t
0x4006 001:
0x4006 002:
Load loss detected [83]
Status signal
Load [%]
•
The threshold is set in percent with reference to the rated motor current "Motor rated cur-
rent" 0x6075 (P323.00).
•
The status signal "Load loss detected [83]" can be assigned, for instance, to a digital output
or the relay via the exible I/O conguraon. 4Conguraon of digital outputs ^ 415
•
The load loss detecon is not acve with acve DC braking.
Parameter Name / value range / [default seng] Info
0x4006:001
(P710.01)
Load loss detecon: Threshold
(Load loss detect: Threshold)
0.0 ... [0.0] ... 200.0 %
Threshold for load loss detecon.
•
100 % ≡ rated motor current 0x6075 (P323.00)
0x4006:002
(P710.02)
Load loss detecon: Deceleraon
(Load loss detect: Deceleraon)
0.0 ... [0.0] ... 300.0 s
Tripping delay for load loss detecon.
0x6075
(P323.00)
Motor rated current
(Motor current)
0.001 ... [1.700]* ... 500.000 A
* Default seng depending on the size.
•
Seng can only be changed if the inverter is inhibi-
ted.
The rated motor current to be set here serves as a reference value for
dierent parameters with a seng/display of a current value in percent.
Example:
•
Motor rated current = 1.7 A
•
Max current 0x6073 (P324.00) = 200 % Motor rated current = 3.4 A
0x6078
(P103.00)
Current actual value
(Current actual)
•
Read only: x.x %
Display of the present motor current.
•
100 % ≡ Motor rated current 0x6075 (P323.00)
Addional funcons
Load loss detecon
277
 Loading...
Loading...





