t
t
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
-40 Hz
-60 Hz
-50 Hz
-30 Hz
-20 Hz
-10 Hz
t
t
t
t
t
t
t
0x2DDD
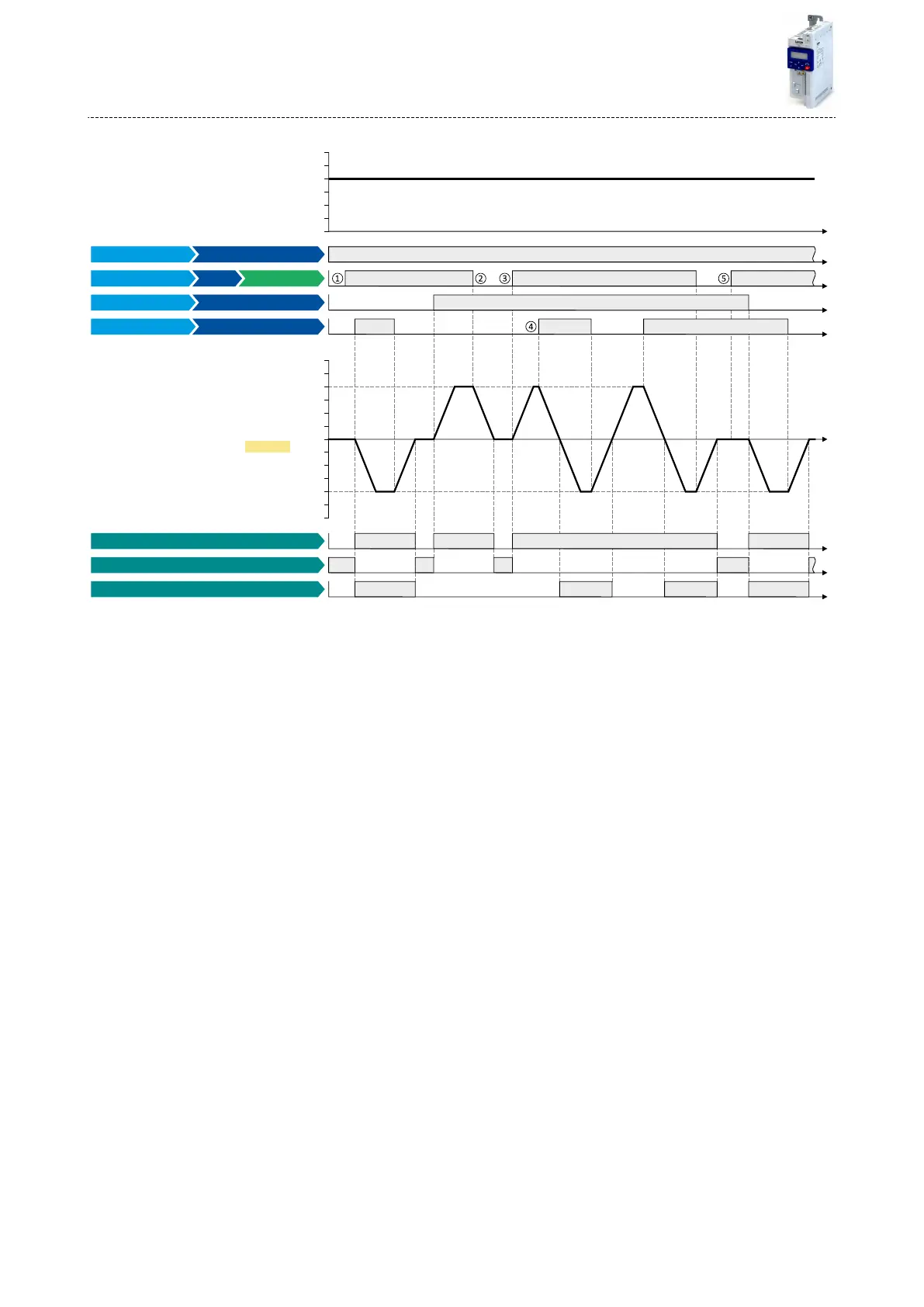
Start enable
Digital input 2 [12] Run forward (CW)
Digital input 1 [11] Run
Digital input 3 [13]
Constant TRUE [1]
Stop active [53]
Rotational direction reversed [69]
Running [50]
Output signals
Status signals
Output frequency
Run reverse (CCW)
Enable inverter
Input signals
Frequency setpoint selection
FunctionTrigger
The status signals can be assigned to digital outputs. 4Conguraon of digital outputs ^ 415
①
The "Run" funcons serves as start enable for the funcons "Run forward (CW)" and "Run reverse (CCW)".
Without start enable, the motor cannot be started.
②
If the start command is cancelled, the motor is stopped with the stop method set in 0x2838:003 (P203.03). In the example: Stop with stand-
ard ramp.
Aer a renewed start enable, the inverter waits for the next run command.
③
If, at start enable, either "Run forward (CW)" or "Run reverse (CCW)" is set to TRUE, the motor starts into the triggered direcon.
④
The inverter always responds to the run command detected last (if start enable is available).
In the example, the "Run reverse (CCW)" command replaces the sll acve "Run forward (CW)" command.
⑤
If, at start enable, both run commands are set to TRUE, the motor remains stopped unl only one valid run command is available.
Flexible I/O conguraon
Start / stop motor
Example 3: Run forward/Run reverse/stop (status-controlled)
360
 Loading...
Loading...





