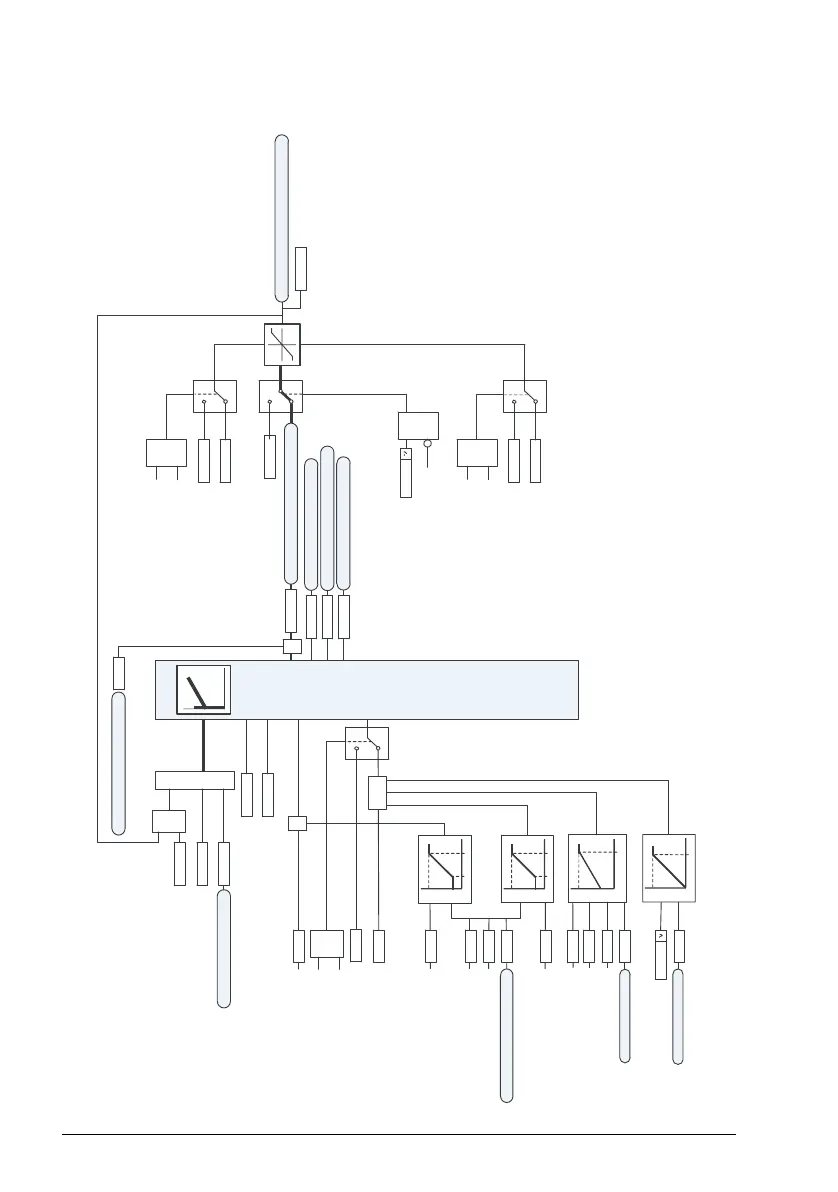
25.04 Speed derivation time
25.05 Derivation filter time
25.02 Speed proportional gain
25.15 Proportional gain em stop
24.46 Speed error step
25.55 Torque deriv reference
25.56 Torque acc compensation
Value
Value
Value
x
25.03 Speed integration time
Value
25.10 Speed ctrl balancing reference
25.09 Speed ctrl balancing enable
25.11 Speed control min torque
Value
25.12 Speed control max torque
Value
Selection
25.08 Drooping rate
PID
Value
25.57 Torque reference unbalanced
-
+
+
Speed regulator
24.03 Speed error filtered
25.01 Torque reference speed control
Value
AND
Stop command
Value
Value
Value
Value
25.18 Speed adapt min limit
25.19 Speed adapt max limit
Value
Value
25.25 Torque adapt max limit
25.26 Torque adapt filt time
25.30 Flux adaption enable
Value
Value
90.01 Motor speed for control
26.01 Torq ref to TC
01.24 Flux actual %
x
25.21 Kp adapt coef at min speed
25.22 Ti coef at min speed
25.18 25.19
25.21
1
25.27
1
25.25
25.18 25.19
1
25. 22
0
0
0
0
25.27 Kp adapt coef at min torque
Value
25.14 Max torq sp ctrl em stop
06.18 bit 11 Em Off1
OR
06.18 bit 13 Em Off3
Value
Value
25.13 Min torq sp ctrl em stop
06.18 bit 11 Em Off1
OR
06.18 bit 13 Em Off3
Value
06.18 bit 11 Em Off1
OR
06.18 bit 13 Em Off3
x
100
1
Value
Value
Value
Value
Value
Value
Value
Value
25.54 Torque integral reference
25.53 Torque prop reference
Value
+
Selection
 Loading...
Loading...











