Program features 95
Settings
Parameters 20.25 Jogging enable (page 241), 20.26 Jogging 1 start source (page
241), 20.27 Jogging 2 start source (page 242), 22.42 Jogging 1 ref (page 253), 22.43
Jogging 2 ref (page 253), 23.20 Acc time jogging (page 260) and 23.21 Dec time
jogging (page 260).
Scalar motor control
It is possible to select scalar control as the motor control method instead of DTC
(Direct Torque Control). In scalar control mode, the drive is controlled with a speed or
frequency reference. However, the outstanding performance of DTC is not achieved
in scalar control.
It is recommended to activate scalar motor control mode
• if the nominal current of the motor is less than 1/6 of the nominal output current of
the drive
• if the drive is used without a motor connected (for example, for test purposes)
• if the drive runs a medium-voltage motor through a step-up transformer, or
• in multimotor drives, if
• the load is not equally shared between the motors,
• the motors are of different sizes, or
• the motors are going to be changed after motor identification (ID run)
In scalar control, some standard features are not available.
See also section Operating modes of the drive (page 26).
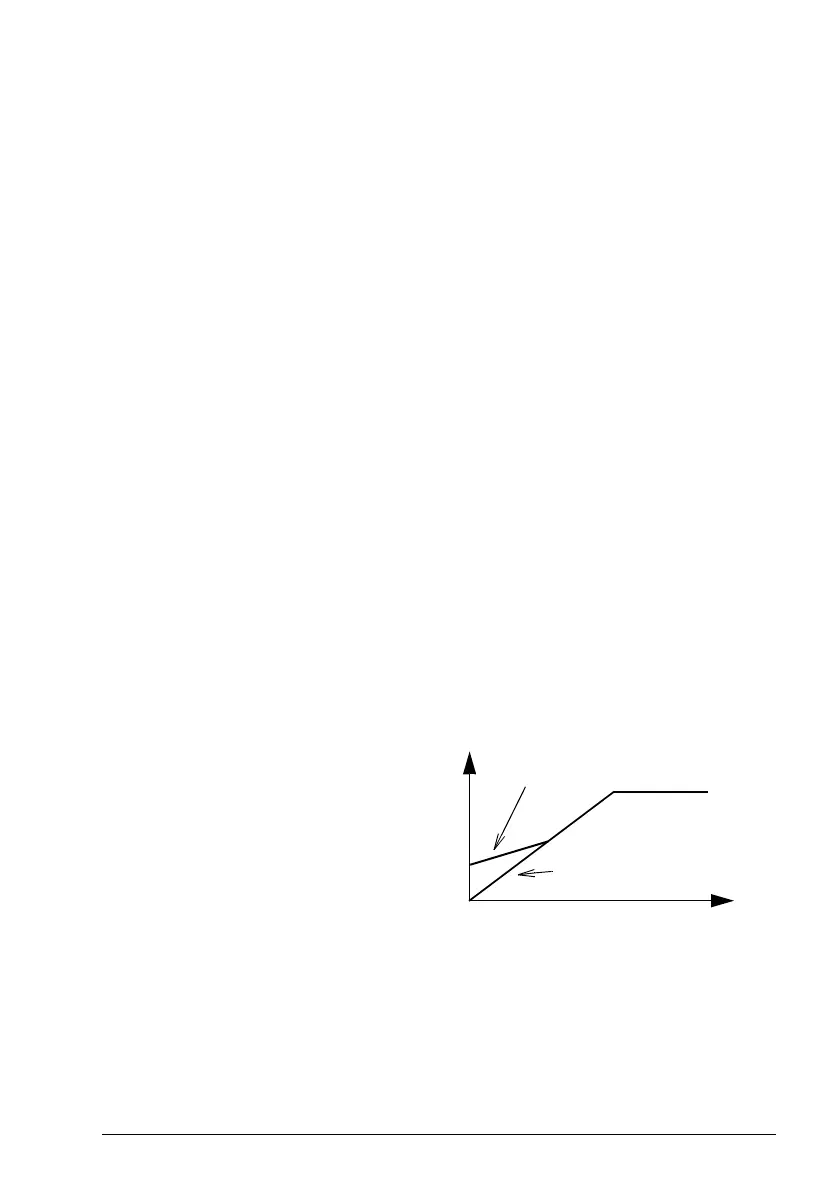
IR compensation for scalar motor control
IR compensation (also known as voltage
boost) is available only when the motor
control mode is scalar. When IR
compensation is activated, the drive
gives an extra voltage boost to the motor
at low speeds. IR compensation is useful
in applications that require a high break-
away torque. In step-up applications,
voltage cannot be fed through the
transformer at 0 Hz, so an additional
breakpoint is available for defining the
compensation near zero frequency.
In Direct Torque Control (DTC), no IR compensation is possible or needed as it is
applied automatically.
Motor voltage
f (Hz)
IR compensation
No compensation
 Loading...
Loading...











