Program features 85
Tuning procedure for oscillation damping
Note: Changing the speed error low-pass filter time constant or the integration time of
the speed controller can affect the tuning of the oscillation damping algorithm. It is
recommended to tune the speed controller before the oscillation damping algorithm.
(The speed controller gain can be adjusted after the tuning of this algorithm.)
Settings
Parameters 26.51…26.58 (page 283).
Resonance frequency elimination
The control program contains a notch filter function for removing the resonance
frequencies from the speed error signal.
Settings
Parameters 24.13…24.17 (page 264).
Rush control
In torque control, the motor could potentially rush if the load were suddenly lost. The
control program has a rush control function that decreases the torque reference
whenever the motor speed exceeds 30.11 Minimum speed or 30.12 Maximum speed.
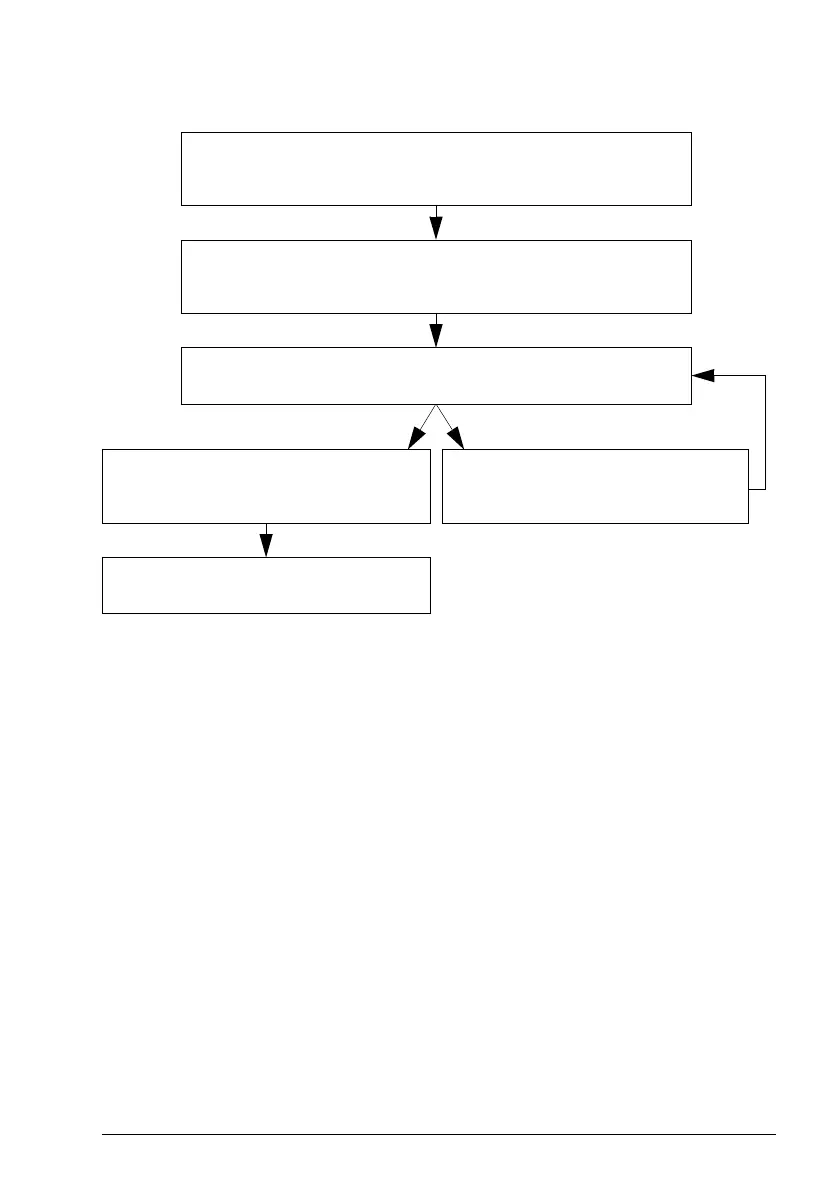
• Select the input by 26.53 Oscillation compensation input
• Activate algorithm by 26.51 Oscillation damping
•Set 26.57 Oscillation damping gain to 0
• Calculate the oscillation frequency from the signal (use the Drive
composer PC tool) and set 26.55 Oscillation damping frequency
•Set 26.56 Oscillation damping phase*
• Increase 26.57 Oscillation damping gain gradually so that the
algorithm starts to take effect.
oscillation amplitude decreases oscillation amplitude increases
• Increase 26.57 Oscillation damping gain
and adjust 26.56 Oscillation damping
phase if necessary
• Try other values for 26.56 Oscillation
damping phase
• Increase 26.57 Oscillation damping gain to
suppress the oscillation totally.
*If the phasing of a DC oscillation cannot be
determined by measuring, the value of 0
degrees is usually a suitable initial value.
 Loading...
Loading...











