120 Rockwell Automation Publication 2097-UM002D-EN-P - April 2017
Chapter 7 Troubleshoot the Kinetix 350 Drive
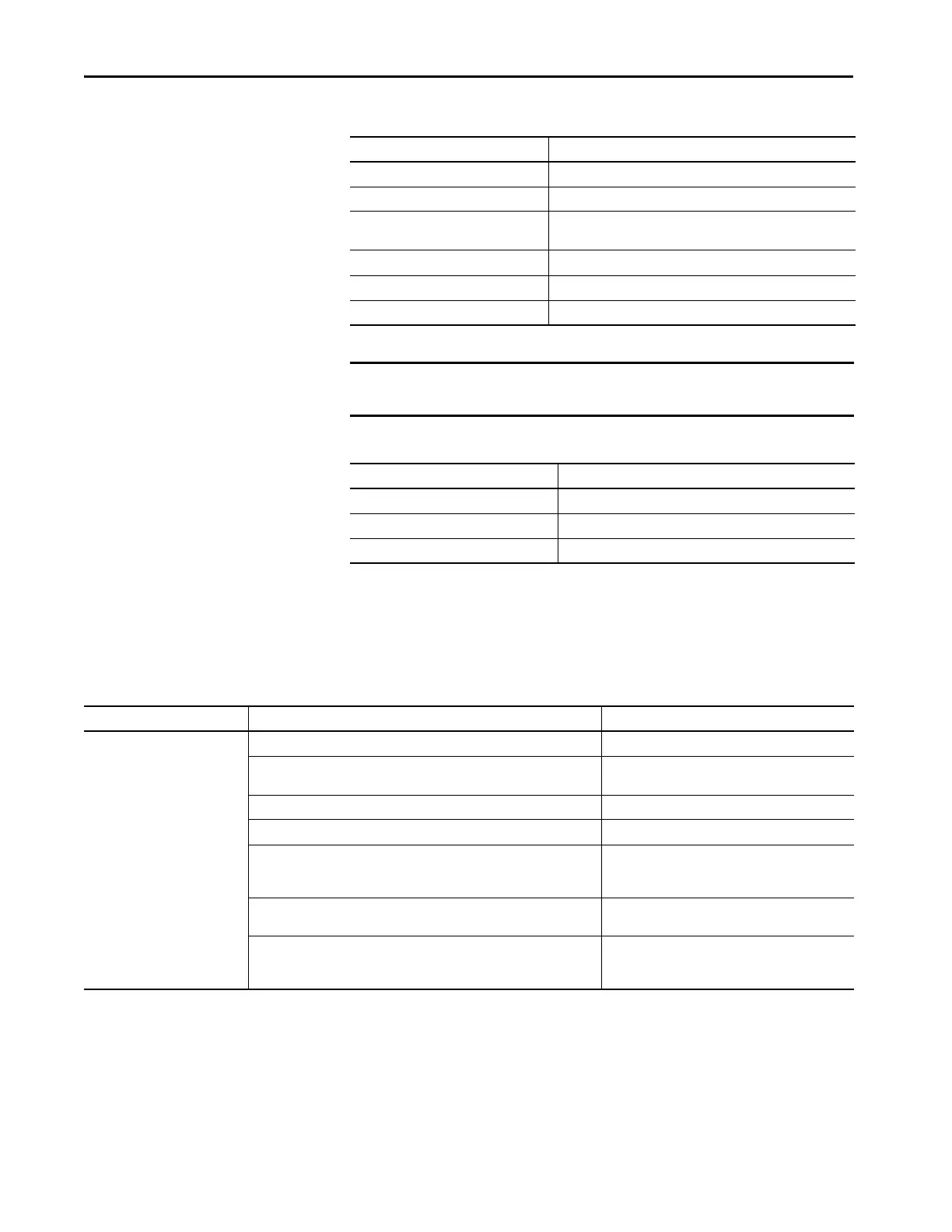
Table 54 - Network Status Indicators
Table 55 - Port 1 Ethernet Communication Status Indicators
General System Behavior
These events do not always result in a fault code, but can require
troubleshooting to improve performance.
Status Description
Off No power or no IP address defined.
Alternating green/red Self-test mode (power-up diagnostics).
Flashing green Standby (device that is not configured, or connection not
established).
Steady green Normal operation. Device has at least one established connection.
Flashing red Recoverable minor fault or connection timeout.
Steady red Non-recoverable major fault or duplicate IP address.
IMPORTANT Under some fault conditions, two reset commands can be required to clear
drive.
Status Description
Off No link partner present.
Flashing green Link partner present, communication occurring.
Steady green Link partner present, no communication occurring.
Table 56 - General System Behavior
Condition Potential Cause Possible Resolution
Axis or system is unstable.
The position feedback device is incorrect or open. Check wiring.
Unintentionally in Torque mode.
Check to see what primary operation mode was
programmed.
Motor tuning limits are set too high. Run Tune in RSLogix 5000 software.
Position loop gain or position controller accel/decel rate is improperly set. Run Tune in RSLogix 5000 software.
Improper grounding or shielding techniques are causing noise to be transmitted
into the position feedback or velocity command lines, causing erratic axis
movement.
Check wiring and ground.
Motor Select limit is incorrectly set (servo motor is not matched to axis module).
•Check setups.
• Run Tune in RSLogix 5000 software.
Mechanical resonance.
Notch filter or output filter can be required (refer to Axis
Properties dialog box, Output tab in RSLogix 5000
software).

 Loading...
Loading...




