AH Motion Controller – Operation Manual
6-2
6.1 Motion Control Devices
Motion control devices are manly used for configuring parameters for motion axis. In most applications, you can set up
axis parameters in ISPSoft software, which is a convenient environment for users. In PLCopen technical standard, the
information and parameters required for configuring motion control on axis are defined as Structures. A structure is a data
type applicable to group the data elements together. You can refer to ISPSoft User Manual for the operation of using
structures.
6.1.1. Structures Applicable for Motion Control
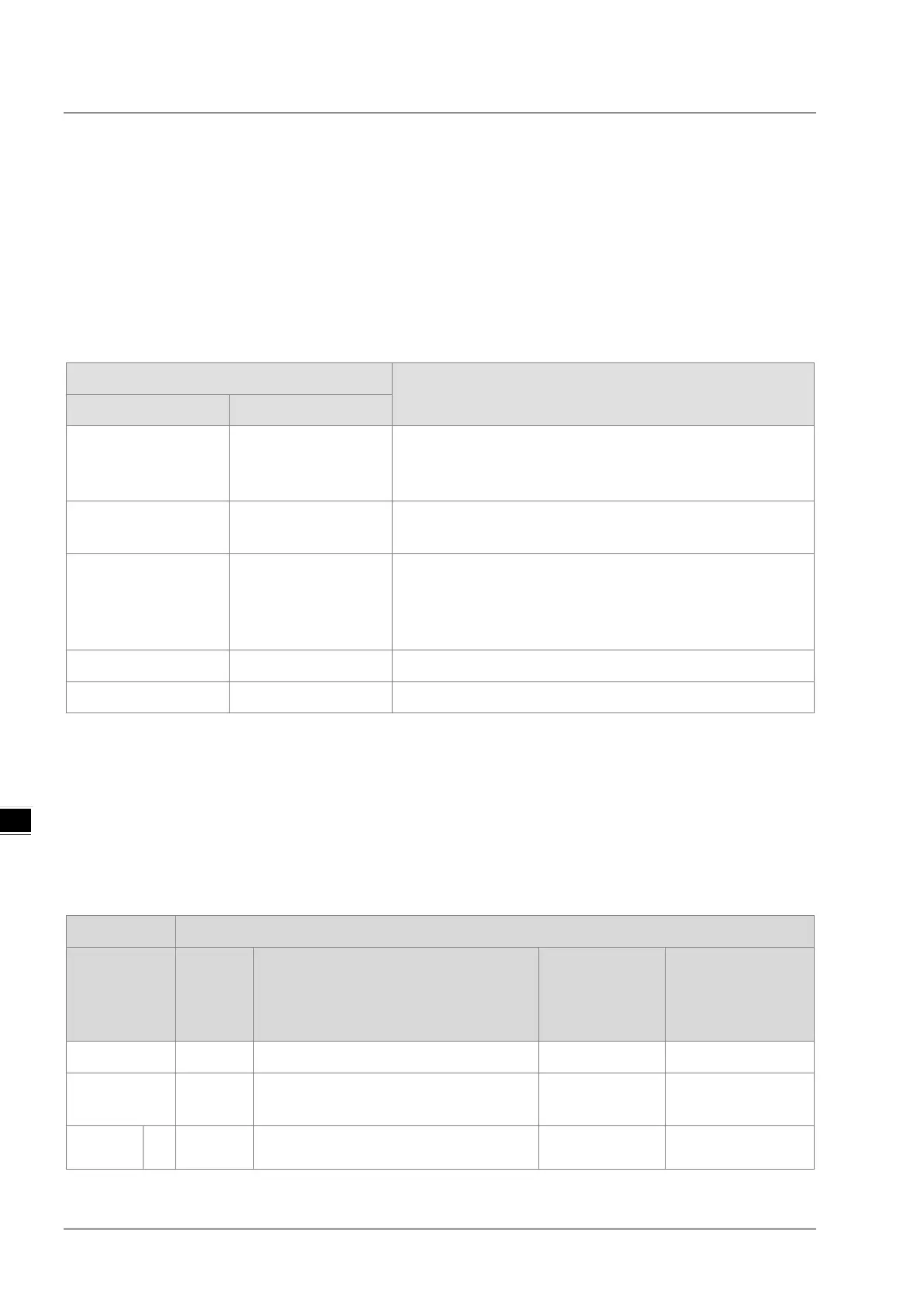
For AH Motion Controller CPUs, the applicable Structure are as below.
Definition
AXIS_REF* Applicable
for MC_ / DFB_
Information and parameters required for configuring axis
motion is grouped in this Structure.
AXES_GROUP_REF N/A Information and parameters required for configuring axes group
motion is included in this Structure.
TRIGGER_REF MC_TouchProbe
MC_AbortTrigger
Information on trigger inputs
Specifications of the trigger
Trigger activation patterns (rising-edge, falling edge,
Information relating to the inputs. Virtual data could be included.
Information relating to physical outputs.
*Note: refer to the 6.1.2 Parameters for Motion Axes of this manual for the list of parameters grouped in the Structure
AXIS_REF which is supported by AH Motion Controller CPU.
6.1.2. Parameters for Motion Axes
For AH Motion Controller CPUs, the applicable structure for setting up axis parameters is AXIS_REF. The below table
can be used in case there is a need to change axis parameters by modifying specific data registers. The detailed
explanation also helps you to have a proper understanding of the axis parameters.
The axis parameters for motion axes
Members Data type Function Setting range
Factory setting
(Default)
Parm_setting WORD
Setting the parameters of the axis specified
Pulse_of_1Rev
DINT
Number of pulses it takes for the motor of
the axis specified to rotate once
1~99999999
pulses/revolution
10,000
ng
32 DINT
Distance generated after the motor of the
axis specified rotate once
1~1000000 10,000

 Loading...
Loading...

