AH Motion Controller – Operation Manual
9-74
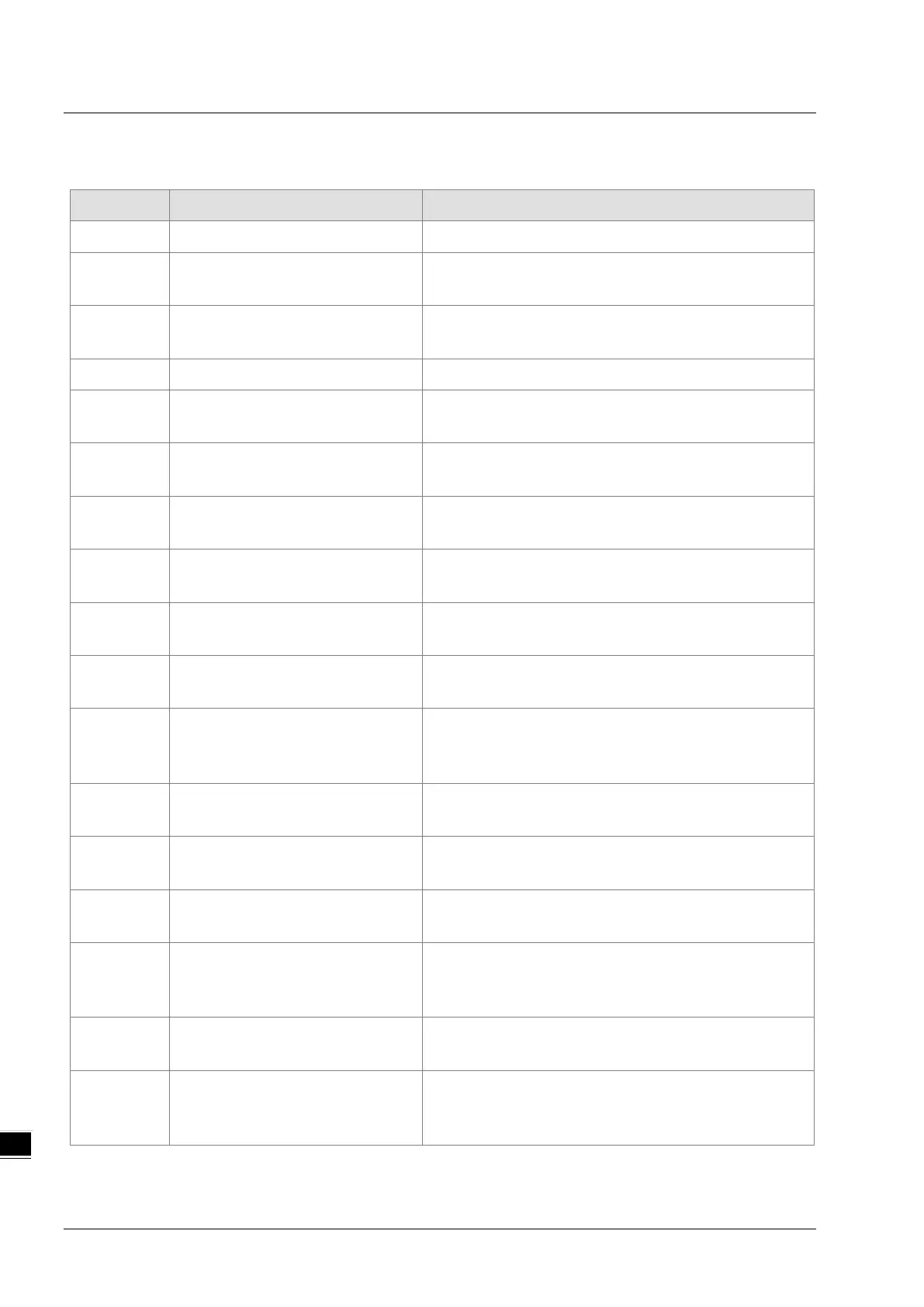
9.4.3. AH05PM-5A/AH10PM-5A/AH15PM-5A
The programs and the setting which are mentioned in the table below are edited in PMSoft version 2.02 or above.
The subroutine has no data.
A program should be written in the subroutine.
16#A003
CJ, CJN, and JMP have no matching
Write the pointers which match CJ, CJN, and JMP
16#A004
There is a subroutine pointer in the
The subroutine pointer can not be in the main program.
The nonexistent subroutine can not be called.
16#A006
The pointer is used repeatedly in the
The pointer can not be used repeatedly in the same
16#A007
The subroutine pointer is used
The subroutine pointer can not be used repeatedly.
16#A008
The pointer used in JMP is used
repeatedly in different subroutines.
The pointer used in JMP can not be used repeatedly in
16#A009
The pointer used in JMP is the same
as the pointer used in CALL.
The pointer used in JMP can not be the same as the pointer
16#A00A
The pointer used in JMP is the same
The pointer used in JMP can not be the same as a
16#A00B
Target position (I) of the single speed
The target position (I) of the single speed should be set
16#A00C
Target position (II) of the single-axis
motion is incorrect.
Check whether target position (II) of the single-axis motion
and target position (I) of the single-axis motion are in
16#A00D
The setting of speed (I) of the
single-axis motion is incorrect.
Set the speed of the single-axis motion.
16#A00E
The setting of speed (II) of the
single-axis motion is incorrect.
The setting value can not be zero.
16#A00F
The setting of the speed (V
RT
) of
returning to zero is incorrect.
Set the speed of returning to zero properly. (The setting
16#A010
The setting of the deceleration (V
CR
)
of returning to zero is incorrect.
Set the speed of returning to zero. The deceleration should
be less than the speed of returning to zero. (The setting
16#A011
The setting of the JOG speed is
The setting value can not be zero.
16#A012
The positive pulses generated by the
single-axis clockwise motion are
The error occurs because the limit sensor is triggered.
Check the status of the limit sensor, and check whether the

 Loading...
Loading...

