Chapter 7 Motion Control Programming
7-17
Whether the current instruction execution has been completed or not depends on the completion output parameter of the
instruction. As the completion output parameter is TRUE, it indicates that the instruction execution is completed and the
buffered instruction execution starts.
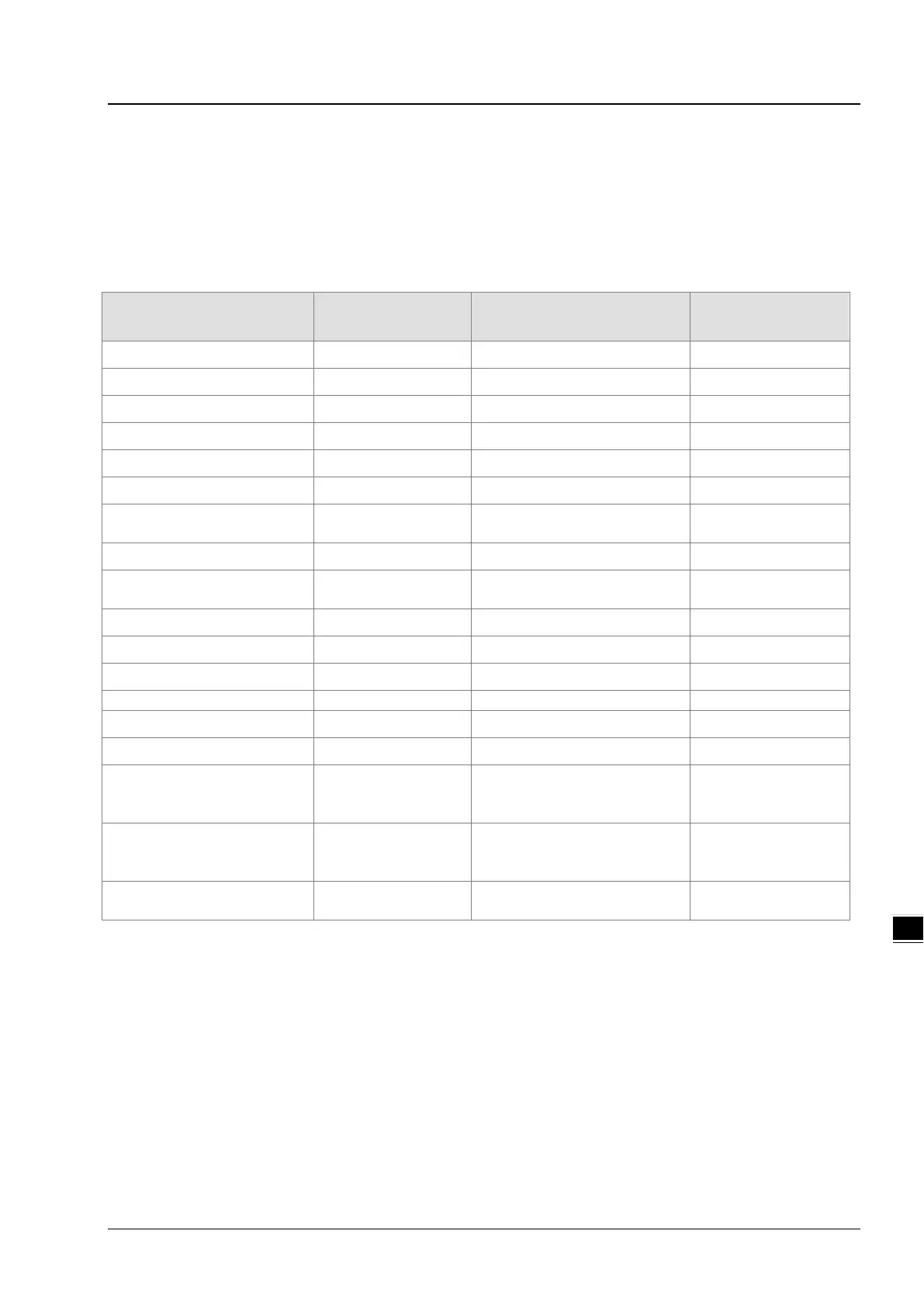
See the completion output parameters of instructions in the following table so as to judge the instruction execution state in
a buffer mode.
Instruction name
instruction?
buffered instruction?
parameter of an
MC_MoveAbsolute Yes Yes Done
MC_MoveRelative Yes Yes Done
MC_MoveAdditive Yes Yes Done
MC_MoveSuperImposed No No ——
MC_MoveVelocity Yes Yes InVelocity
MC_Home No Yes Done
MC_Stop No Yes
Done=True and
MC_Halt Yes Yes Done
MC_TorqueControl Yes
Only for
InTorque
MC_Power No Yes Status
MC_HalfSuperimposed No No ——
MC_CamIn Yes Yes EndOfProfile
MC_GearIn Yes Yes InGear
MC_GearOut No Yes Done
MC_PhasingAbsolute Yes
Only for
MC_PhasingAbsolute/
Done
MC_PhasingRelative Yes
Only for
MC_PhasingAbsolute/
Done
MC_VelocityControl Yes
Only for
MC_VelocityControl/MC_Halt
InVelocity
7.7 Execution of Function Block Instructions
The execution of the motion control instrucitons is controlled by the input parameters, and the status and execution results
are indicated on the outputs. This section introduces the definition and function of the common interface of function block
instructions.
7.7.1 The Interface of a Motion Control Function Block
Common inputs and outputs in motion control function blocks are listed below. A function block has one or a part of the
inputs/outputs listed below. For example, a function block has either the Execute input or the Enable input, based on the
properties of the motion control function block.