AX-Series Motion Controller Instructions Manual Chapter 2
354
Name Function Data Type Setting Value Timing to Take Effect
Axis
Specify the
axis.
AXIS_REF_SM3* AXIS_REF_SM3 When bExecute turns to True.
*Note: AXIS_REF_SM3 (FB): The interface is built in every function block and works as the starting program of the function
block.
Function
Explanation of eStopMode
ENUM ENUM Name
0 SMC3_PCL_OFF
1 SMC3_PCL_DISABLE
2 SMC3_PCL_HALT
3 SMC3_PCL_ENABLE
SMC3_PCL_OFF: When LagError is out of the allowed range, the axis is still running.
SMC3_PCL_DISABLE: When LagError is out of the allowed range, the axis parameter bRegulatorOn changes
to False.
SMC3_PCL_HALT: When LagError is out of the allowed range, the axis parameter bDriveStart changes to False.
SMC3_PCL_ENABLE: When LagError is out of the allowed range and the axis stops, there are no change for
bRegulatorOn and bDriveStart states.
Calculation and Judgement of Lag Error
|(fActPosition + fSetActTimeLagCycles * [Task cycle time] * fActVelocity – fSetPosition)|> fMaxPositionLag
fSetActTimeLagCycles sets the lag cycle between the command value and actual value. The bigger the
difference between the set lag cycle and actual lag cycle, the more likely the lag error will occur due to the error
between the command position and actual position.
When LagError is out of the range, bOutOfRange will change to True and the axis will perform corresponding action
based on the setting of eStopMode.
Troubleshooting
When an error occurs during the execution of the instruction or the axis enters “Errorstop” state, bError changes to
True and the axis stops running. To confirm current error state, see the error code in ErrorID.
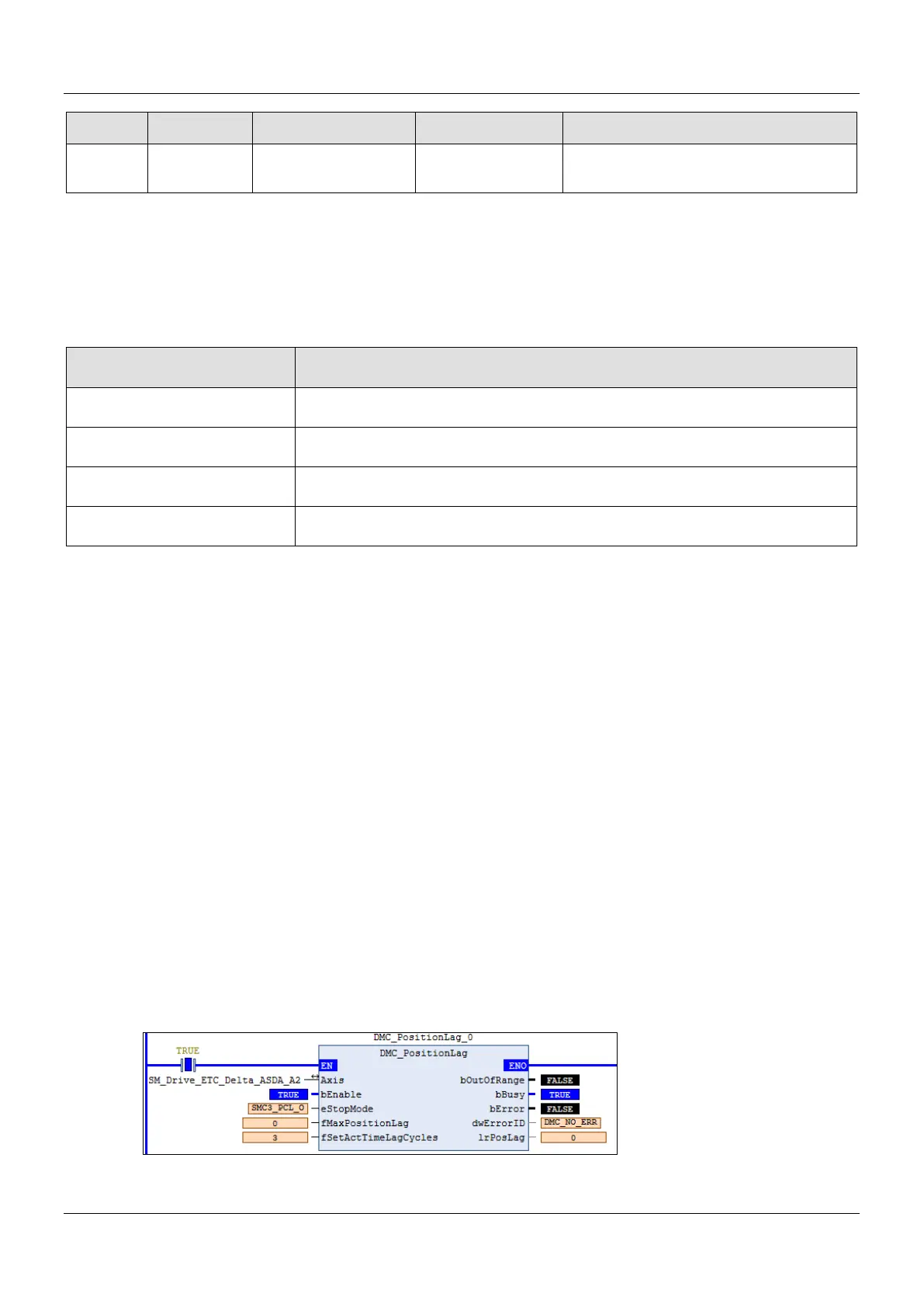
Programming Example
The example illustrates how to observe the position lag state and modify the position lag parameters via
DMC_PositionLag.