AX-Series Motion Controller Instructions Manual Chapter 2
458
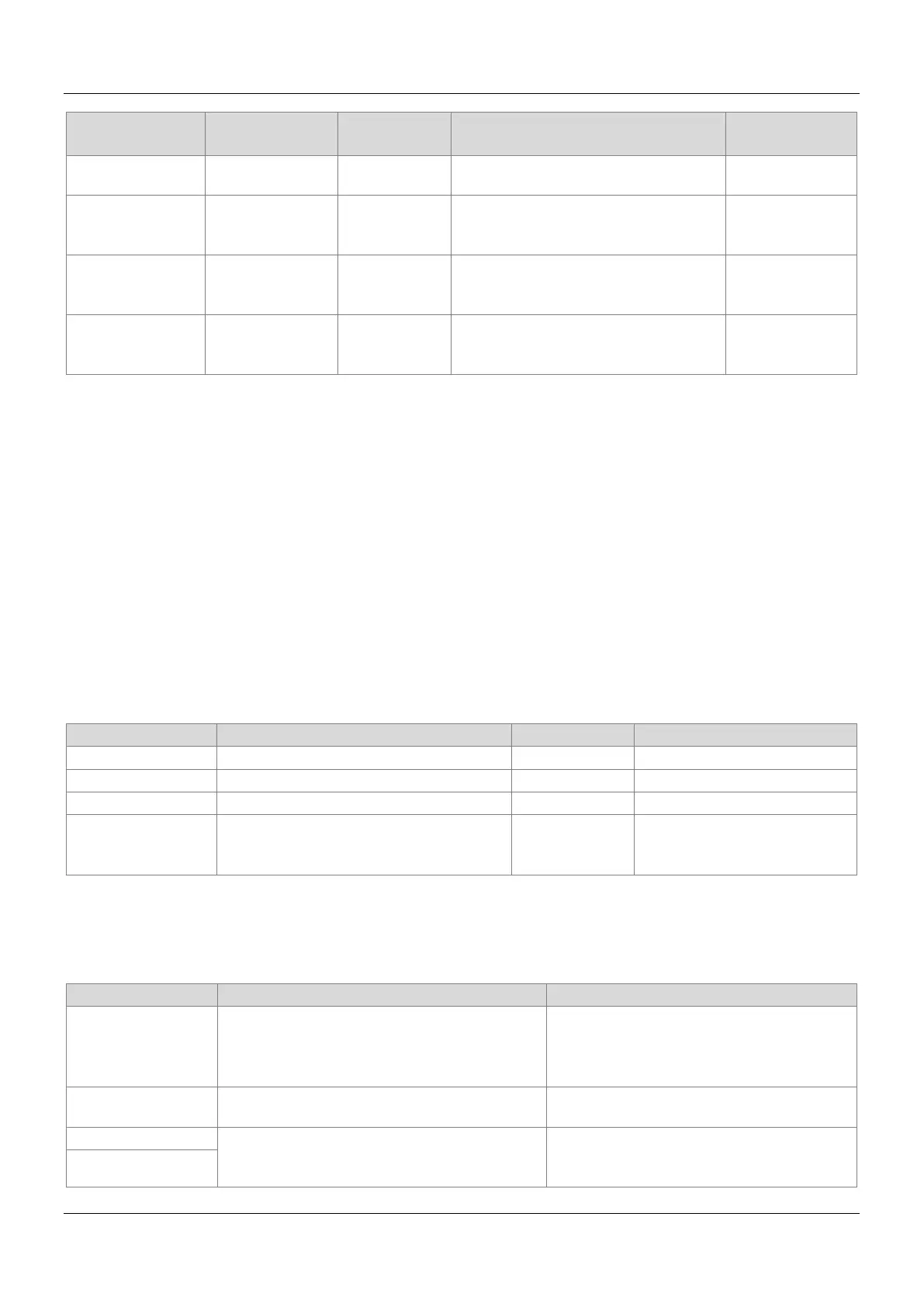
Name Function Data Type
Setting Value
Timing to Take
limit (%)
bBusy is False
lrPID_OutputNegati
veLimit
Tension PID
negative output
limit (%)
LREAL
0~655.35
(1.0)
When bExecute
turns to True and
bBusy is False
lrForwardSpeedLim
it
Torque mode
forward speed
LREAL
0~120
(10)
When bExecute
turns to True and
lrReverseSpeedLim
it
Torque mode
reverse speed
limit (%)
LREAL
0~120
(10)
When bExecute
turns to True and
bBusy is False
*Note:
1. R2R_TENSION_CTRL_MODE: Enumeration (Enum)
2. R2R_WINDING_MODE: Enumeration (Enum)
3. R2R_LINE_SPEED_SOURCE: Enumeration (Enum)
4. R2R_TENSION_TARGET_SOURCE: Enumeration (Enum)
5. R2R_TENSION_TARGET_SOURCE_AT_ZERO_SPEED: Enumeration (Enum)
6. R2R_PID_TARGER_SOURCE: Enumeration (Enum)
7. R2R_PID_FEEDBACK_SOURCE: Enumeration (Enum)
8. R2R_PID_ADAPTABILITY_REFERENCE_SOURCE: Enumeration (Enum)
Outputs
Setting Value (Default Value)
bDone True when complete to write the parameters. BOOL True/False (False)
bBusy True when the instruction is running. BOOL True/False (False)
True when an error occurs.
ErrorID
Record the error code when an error occurs.
Refer to Appendix for error code
descriptions.
DML_ERROR*
DML _ERROR
(DML _NO_ERROR)
*Note: DMC_ERROR: Enumeration (Enum)
Output Update Timing
Name Timing for shifting to True Timing for shifting to False
bDone
When the movement resumes. When bExecute turns to False.
When bExecute is False but bDone turns
to True, bDone will remain True for one
scan cycle and then change to False.
bBusy
When bExecute turns to TRUE.
When bDone turns to True.
When bError turns to True.
When an error occurs in the execution
conditions or input values for the instruction.
(Error code is recorded in ErrorID).
When bExecute turns to False. (Error
Code is cleared)
ErrorID