AX-Series Motion Controller Instructions Manual Appendix A
551
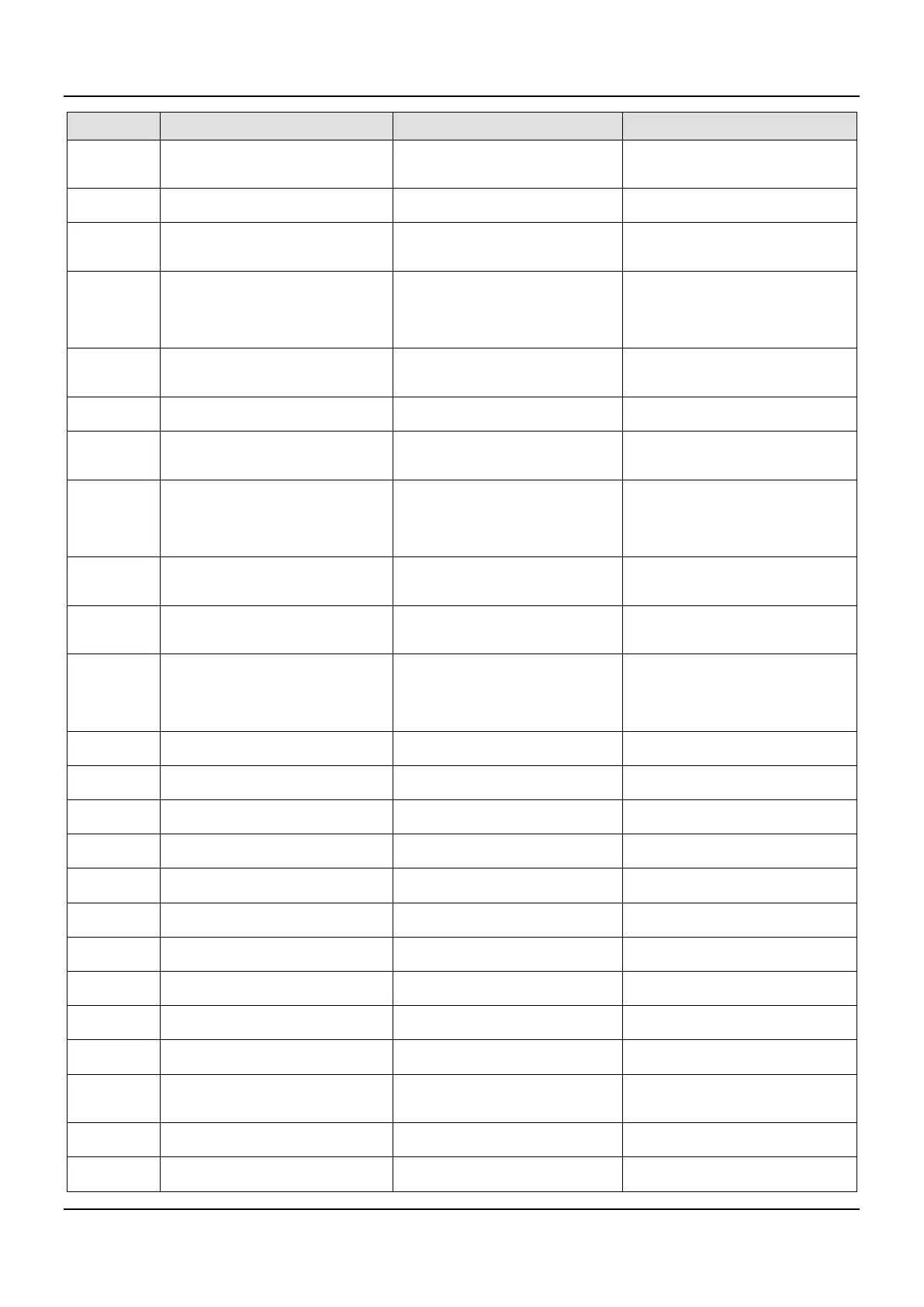
Error code Description Contents Corrective Action
0x186C9 DML_VC_AXIS_NOT_READY_FOR_M
OTION
The axis state cannot execute motion
control instructions.
After confirming the axis at the state that
can execute motion instructions, re-run
0x186CA DML_VC_INVALID_VALUES The input parameter is invalid Setting
Confirm pin input parameter value. Re-
execute the FB after modification.
0x186CC DML_VC_AXIS_NOT_SUPPORT_VL_M
ODE
Slave does not support the VL mode. The current selected slave does not
support Velocity Mode. use another
0x186D2 DML_HA_SDO_RW_FAIL SDO read & write failed. Reply to the slave communication,
confirm the pin input parameter value
meets the definition range of slave
Object, and then re-run the function
0x186D3 DML_HA_AXIS_NOT_READY_FOR_M
OTION
The axis state cannot execute motion
control instructions.
After confirming the axis at the state that
can run motion instructions, re-run the
0x186D4 DML_HA_INVALID_VALUES The input parameter is invalid Setting
Confirm pin input parameter value. Re-
execute the FB after modification.
0x186D6 DML_HA_AXIS_NOT_SUPPORT_PV_M
ODE
Slave does not support the PV mode. The current selected slave does not
support Profile Velocity Mode. use
0x186DC DML_MS_SDO_RW_FAIL SDO read & write failed. Reply to the slave communication,
confirm the pin input parameter value
meets the definition range of slave
Object, and then re-run the function
0x186DD DML_MS_AXIS_NOT_READY_FOR_M
OTION
The axis state cannot execute motion
control instructions.
After confirming the axis at the state that
can run motion instructions, re-run the
0x186EA DML_H_AXIS_NOT_SUPPORT_HM_M
ODE
Slave does not support the HM mode. The current selected slave does not
support Homing Mode. Use another
0x186F0 DML_R_SDO_RW_FAIL SDO read & write failed. Reply to the slave communication,
confirm the pin input parameter value
meets the definition range of slave
Object, and then re-run the function
0x18A88 DML_R2R_CIG_TENSION_CTRL_UNS
Tension control is not supported. Tension control is not supported.
0x18A89 DML_R2R_CIG_COMMUNICATION_ER
SDO communication error. SDO communication error.
0x18A8A DML_R2R_CIG_REUSED_ANALOG_IN
AVI analog input is reused. AVI analog input is reused.
0x18A8B DML_R2R_CIG_REUSED_ANALOG_IN
ACI analog input is reused. ACI analog input is reused.
0x18A8C DML_R2R_CIG_EXE_NOT_ON_STATE
R2R_Configuration is not run in power
R2R_Configuration is not run
0x18A8D DML_R2R_CIG_GEAR_RATIO_IS_OVE
Gear ratio is out of range. Gear ratio is out of range.
0x18A8E DML_R2R_CIG_LINE_SPEED_MAX_IS
The maximum linear velocity is out of
The maximum linear velocity is out of
0x18A8F DML_R2R_CIG_TENSION_MAX_IS_OV
The maximum tension is out of range. The maximum tension is out of range.
0x18A90 DML_R2R_CIG_OUTPUT_LIMIT_IS_O
Control output limit out of range. Control output limit out of range.
0x18A91 DML_R2R_CIG_UNSUPPORTED_TEN
Tension target source not supported. Tension target source not supported.
0x18A92 DML_R2R_CIG_UNSUPPORTED_TEN
SION_TARGET_SOURCE_AT_0_SPEE
Zero speed tension target source not
supported.
Zero speed tension target source not
supported.
0x18A93 DML_R2R_CIG_UNSUPPORTED_PID_
PID target source not supported. PID target source not supported.
0x18A94 DML_R2R_CIG_UNSUPPORTED_PID_
PID feedback source not supported. PID feedback source not supported.
 Loading...
Loading...

