Speed compensaon for protecng motors at low speed
The inverter comes with an implemented compensaon for low speed. If the motor is driven
with frequencies lower than 40 Hz, the speed compensaon in 0x2D4B:002 (P308.02)should
be set to "On [0]" (default seng). This seng serves to reduce the release me of the moni-
toring at low speed to consider the reduced natural venlaon at AC motors. The speed com-
pensaon for UL-compliant operaon in 0x2D4B:002 (P308.02) must be set to "On [0]" as
well.
If the speed compensaon is acvated, the release me is reduced as follows:
•
With an output frequency < 40 Hz: Reduced release me to 62.5 % + 37.5 % * output fre-
quency [Hz] / 40 [Hz]
•
With an output frequency ≥ 40 Hz: No reduced release me
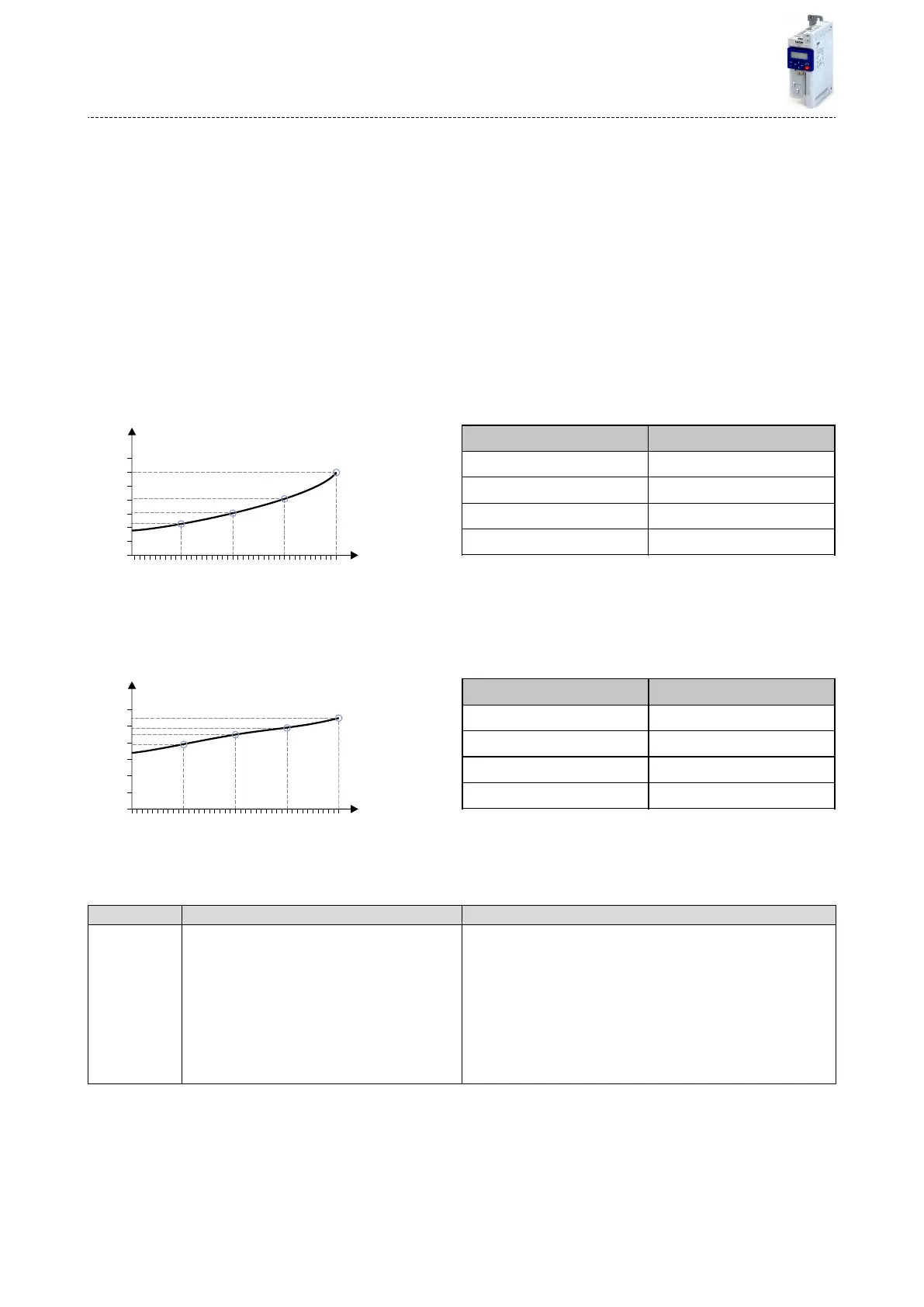
The following diagram shows the reduced release me with acvated speed compensaon.
•
Maximum ulisaon 0x2D4B:001 (P308.01) = 150 %
•
Speed compensaon 0x2D4B:002 (P308.02) = "On [0]"
10
20
30
40
50
70
60
[s]
0
[Hz]
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
2
The following diagram shows the possible permanent load with acvated speed compensa-
on without the monitoring being triggered.
•
Maximum ulisaon 0x2D4B:001 (P308.01) = 150 %
•
Speed compensaon 0x2D4B:002 (P308.02) = "On [0]"
20
40
60
80
120
100
[%]
0
[Hz]
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
2
0
In case of 0 Hz, only a load of 62.7 % (≈ 62.5 %) with regard to the load at 40 Hz or above is
possible (69 / 110 * 100 % = 62.7 %). In case of a deviang seng in 0x2D4B:001 (P308.01),
the maximum possible motor load changes proporonately.
Parameter Name / value range / [default seng] Info
0x2D4B:001
(P308.01)
Motor overload monitoring (i²*t): Maximum ulisa-
on [60 s]
(Motor overload: Max.load.for 60s)
30 ... [150] ... 200 %
Maximum permissible thermal motor ulisaon (max. permissible motor
current for 60 seconds).
•
100 % ≡ rated motor current 0x6075 (P323.00)
•
If the motor is actuated with the current set here for 60 seconds, the
maximum permissible thermal motor ulisaon is reached and the
response set in 0x2D4B:003 (P308.03) is executed.
•
If the motor is actuated with a dierent current, the me period unl
the motor overload monitoring funcon is acvated is dierent. Gen-
erally the following applies: the lower the current, the lower the ther-
mal ulisaon and the later the monitoring funcon is triggered.
Motor control
Motor protecon
Motor overload monitoring (i²*t)
164
 Loading...
Loading...





