Stop method = "Coasng [0]"
Parameter Name Seng for this example
0x2631:001 (P400.01) Enable inverter Digital input 1 [11]
0x2631:002 (P400.02) Run Digital input 2 [12]
0x2838:003 (P203.03) Stop method Coasng [0]
0x2860:001 (P201.01) Frequency control: Default setpoint source Frequency preset 1 [11]
0x2911:001 (P450.01) Frequency setpoint presets: Preset 1 40 Hz
0x2B84:001 (P704.01) Current 50 %
0x2B84:002 (P704.02) Automac hold me 10 s
0x2B84:003 (P704.03) Automac operang threshold 15 Hz
t
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
t
t
0 Hz
30 Hz
10 Hz
20 Hz
40 Hz
50 Hz
60 Hz
t
t
t
t
0x2DDD
Output frequency
Stop active [53]
DC braking active [67]
Running [50]
Status signals
DC brake
Digital input 2 [12] Run
Digital input 1 [11]
Output signals
Enable inverter
Input signals
Frequency setpoint selection
FunctionTrigger
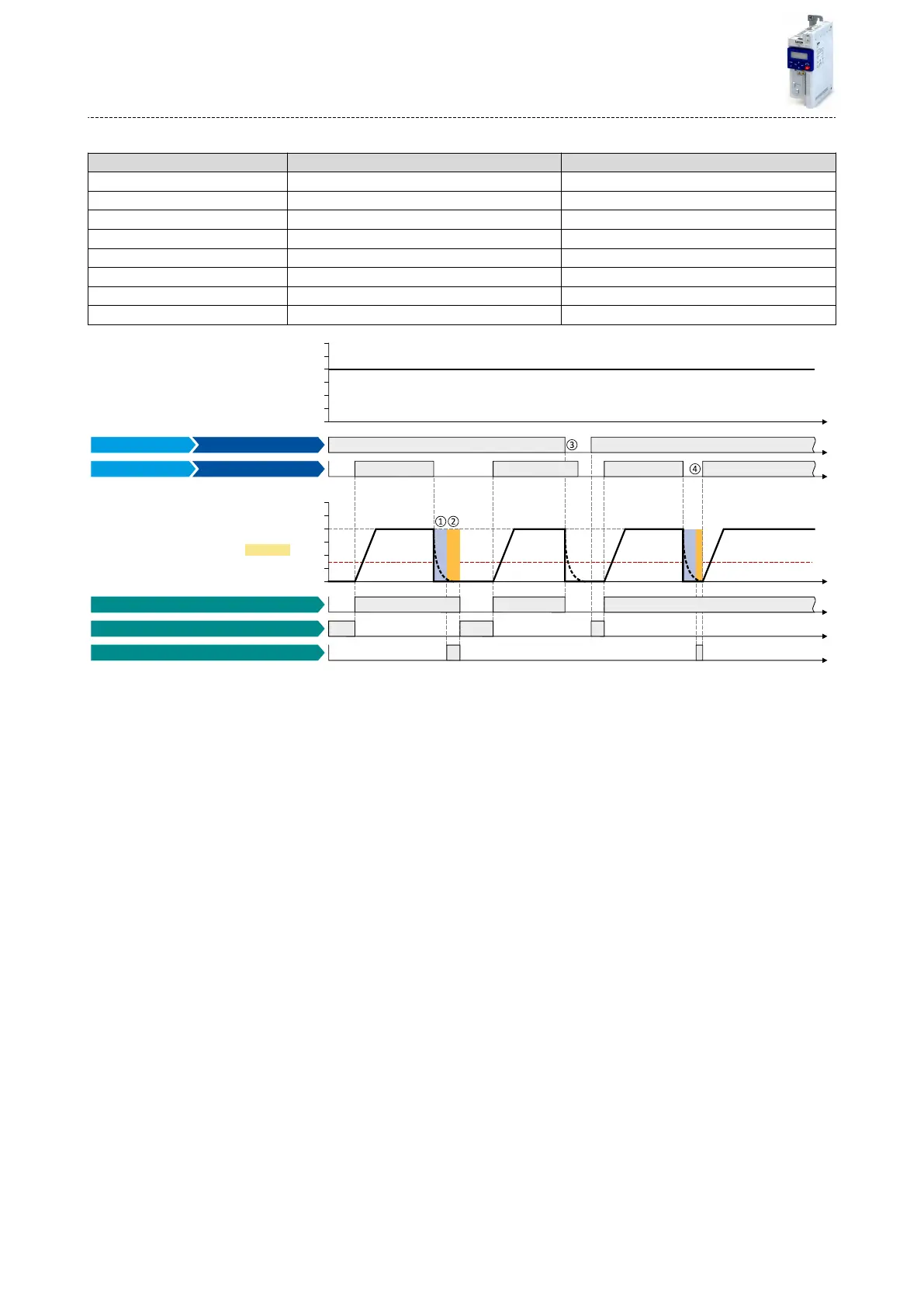
The status signals can be assigned to digital outputs. 4Conguraon of digital outputs ^ 415
①
With the stop method "Coasng [0]", the motor rst coasts for a specied me. This "demagnesing me" serves to reduce the induced
voltage.
②
The DC braking becomes acve for the hold me set in 0x2B84:002 (P704.02).
③
If the inverter is disabled, the motor coasts. (DC braking is only possible if the inverter is enabled.)
④
If there is a new start command within the hold me, the DC braking is cancelled. The motor is accelerated to the setpoint again.
Addional funcons
DC braking
Example 2: Automac DC braking when the motor is stopped
272
 Loading...
Loading...





