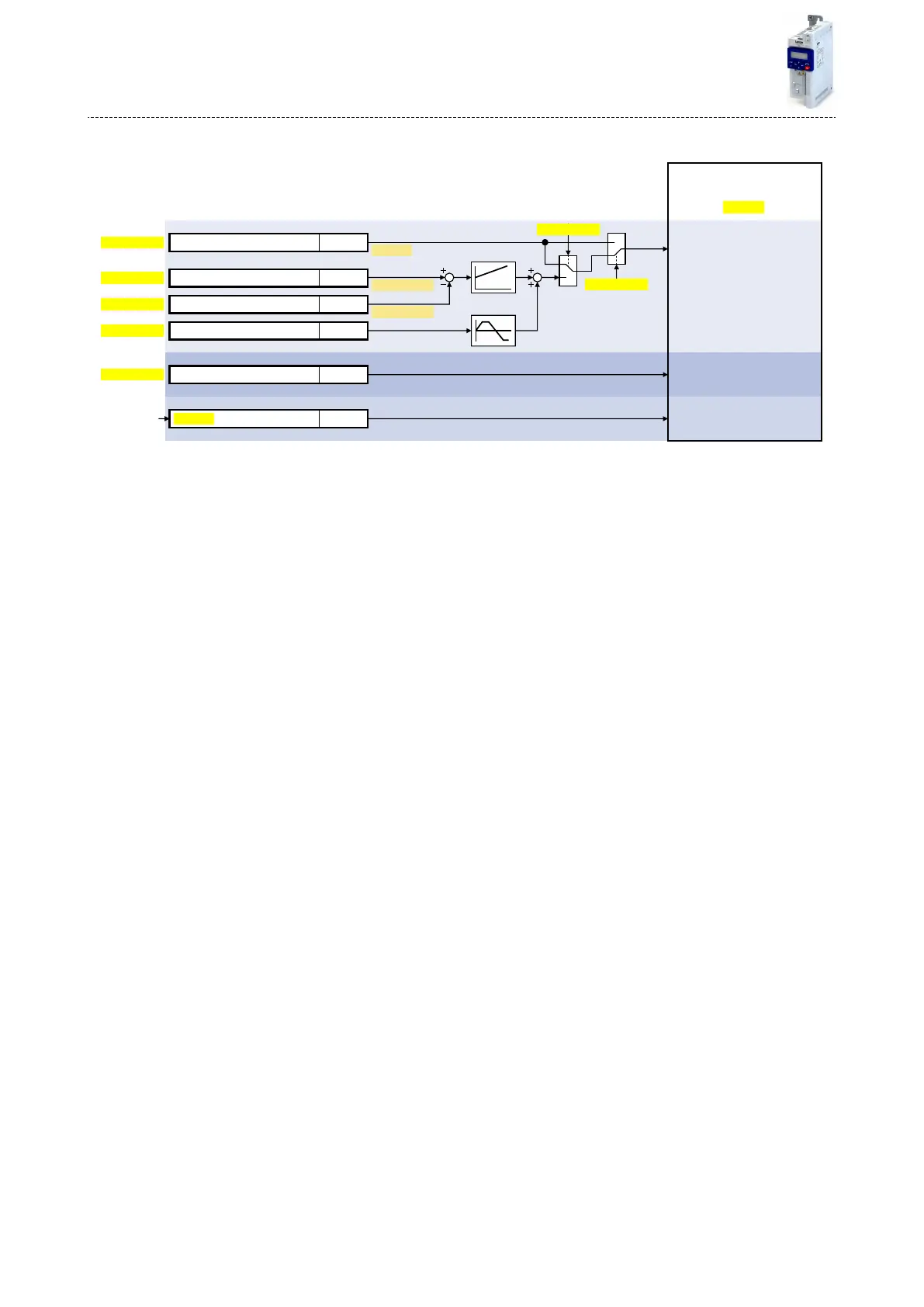
The following signal ow shows the internal setpoint logics:
0
1
0x2B0E
0x4020:002
rpm
0x4020:001
0x2631:045
0x4020:004
0x401F:001
0x401F:002
0x6042
1...4
0
0x6060
%
Hz
PID Unit
PID Unit
Hz
0x2860:001
0x2860:002
0x2860:003
MS = manufacturer specific
Network
[Hz]
Frequency setpoint
Torque setpoint
PID setpoint
PID variable
Speed feedforward control
Motor control
Modes of operation
MS: Velocity mode [-2]
(default setting)
Deactivate
PID control
(trigger)
Process controller: operating mode
CiA: Velocity mode [2]
MS: Torque mode [-1]
Target velocity
Notes:
•
In case of an acvated network control, the funcons for setpoint change-over are not
acve! If in case of network control no setpoint is dened via the network control word,
the standard setpoint source is acve.
•
The setpoint used by the motor control depends on the operang mode selected in
0x6060 (P301.00):
•
"MS: Velocity mode [-2]": The acve frequency setpoint is used. In addion, the PID
control can be acvated in 0x4020:001 (P600.01). 4Conguring the process control-
ler ^ 238
•
"MS: Torque mode [-1]": The
acve torque setpoint is used. 4Torque control w/ freq.
limit ^ 153
•
"CiA: Velocity mode [2]": The setpoint speed dened via the "Target velocity" 0x6042
(P781.00) parameter is used. 4Device prole CiA 402 ^ 297
•
As only one setpoint source can be acve at a me, priories are assigned to the fre-
quency, PID and torque setpoint sources. For details see the following subchapter "Priority
of the setpoint sources". ^ 367.
Diagnosc parameters:
•
0x282B:002 (P125.02): Acve setpoint source
Flexible I/O conguraon
Setpoint change-over
366
 Loading...
Loading...





