B.2 Non-Contacting Sensor
B.2.1 Principle of operation of NCS
The NCS contains a magnetic field sensor. This sensor changes its electrical resistance in
response to the immediate presence of a permanent magnet. The sensor has a high signal-to-
noise ratio to external magnetic fields due to the measurement method used.
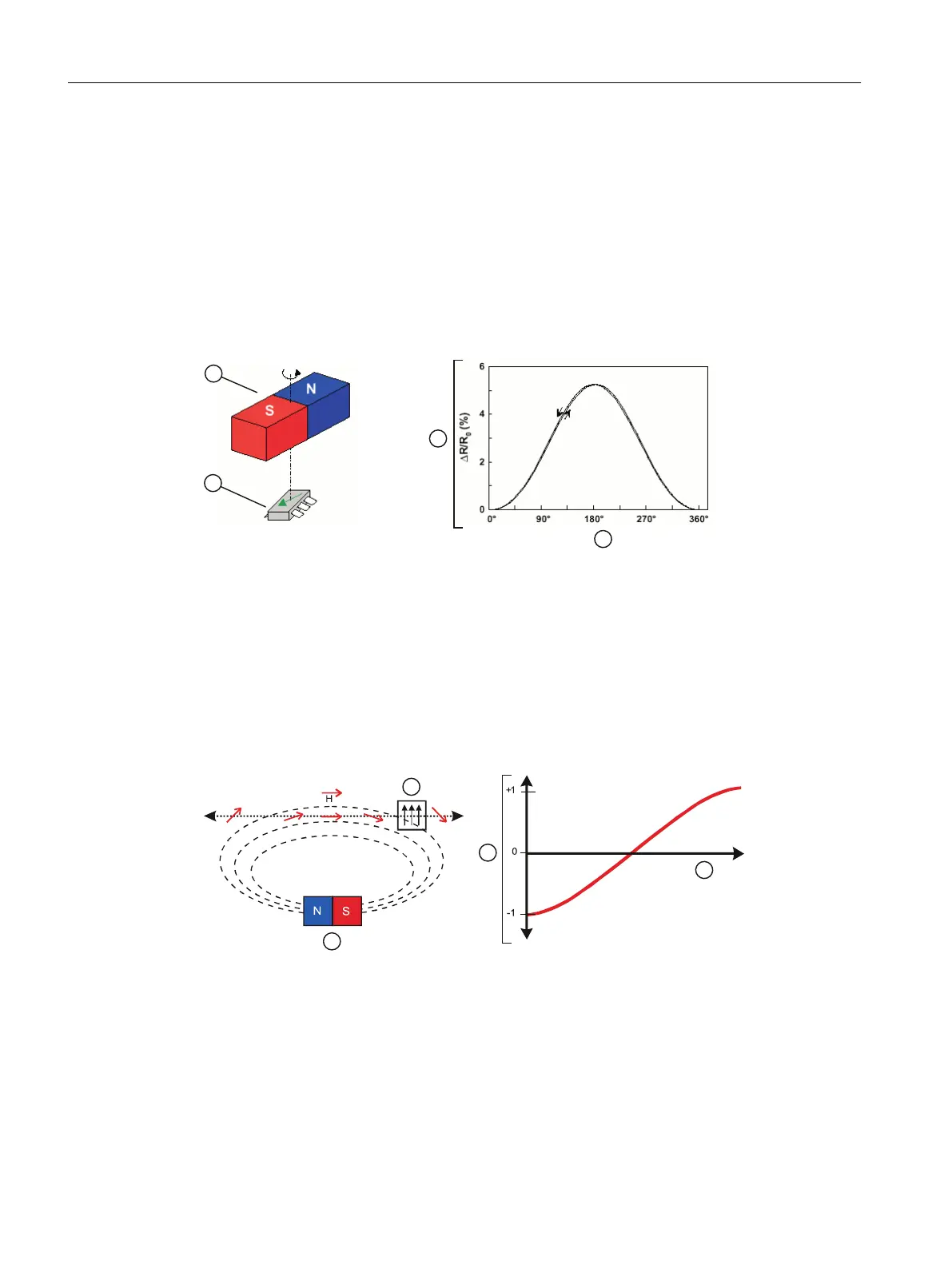
The following figure shows the mode of operation with a rotating magnet.
① Magnet ③ Resistance change
② Sensor ④ Angle
Figure B-1 Relative resistance change depending on the angle of the magnet
The figure shows that a circular movement of the magnet generates a sinusoidal change of the
resistance. The mechanical stops of the fitting ensure that only one part (quadrant) of the
sinusoidal curve is used at any one time. The principle-related non-linearity of the curve is
corrected by means of software based on a curve that is stored in the positioner.
A linear movement of the magnet in the sensor range also generates a resistance change that
is used to identify the position. The following figure highlights the principle:
① Magnet ③ Resistance change
② Sensor ④ Angle
Figure B-2 Resistance change depending on the position of the magnet
Non-linearity is corrected automatically in the positioner by software.
The great advantage of this principle is the absence of wear. Moreover, vibration, dampness
and temperature only have a minor impact on the measurement result.
External position detection
B.2 Non-Contacting Sensor
SIPART PS2 with 4 to 20 mA/HART
272 Operating Instructions, 11/2019, A5E00074631-AE

 Loading...
Loading...





