18. NAVIGATION SENSORS
18-3
Reference SPD: If checked, radar is used as the source for speed and course. Check-
mark is valid when the speed measurement method is “ground”. Not available with
system sensor.
Set and drift: Check the [Set Drift] checkbox to manually set speed and course of drift.
Note that you can select manual drift only if you deactivate the AIS function. Check-
mark is valid when the speed measurement method is “water”. Not available with sys-
tem sensor.
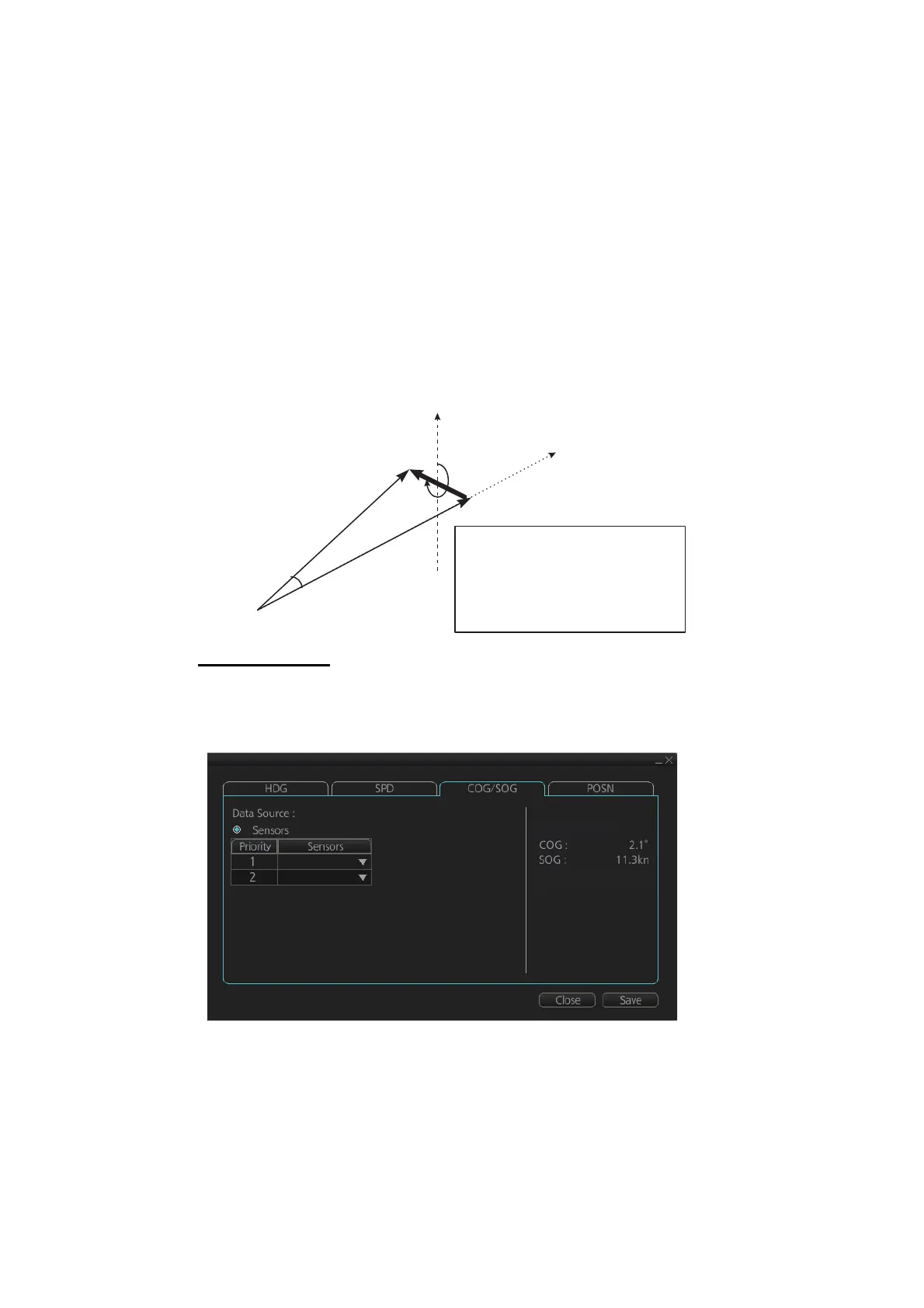
Angle = Difference between heading and COG
Spd = Speed component of the drift vector
Cse = Course component of the drift vector
Vector defined by (SOG and COG) is equal to vector sum of vectors defined by (SPD
and HDG) and (set and drift).
COG/SOG page
Select the source (GPS receiver) for speed over the ground and course over the
ground.
HDG
spd
SOG
COG
cse
SPD: water speed
HDG heading of ship
SOG: speed over ground
COG: course over ground
spd: speed of drift
cse: course of drift
angle: difference between HDG and COG
North
SPD
angle
Not Available
FILT
PRIM: FILT

 Loading...
Loading...










