1. INTRODUCTION
1-12
1.11 How to Enter Heading
Heading can be entered manually or automatically.
Note: When the vessel is in high latitudes (over 85°), data from the gyrocompass is
not used. The internal filter data is used for heading calculation. In this case, the head-
ing source in the sensor information box appears as "FILT".
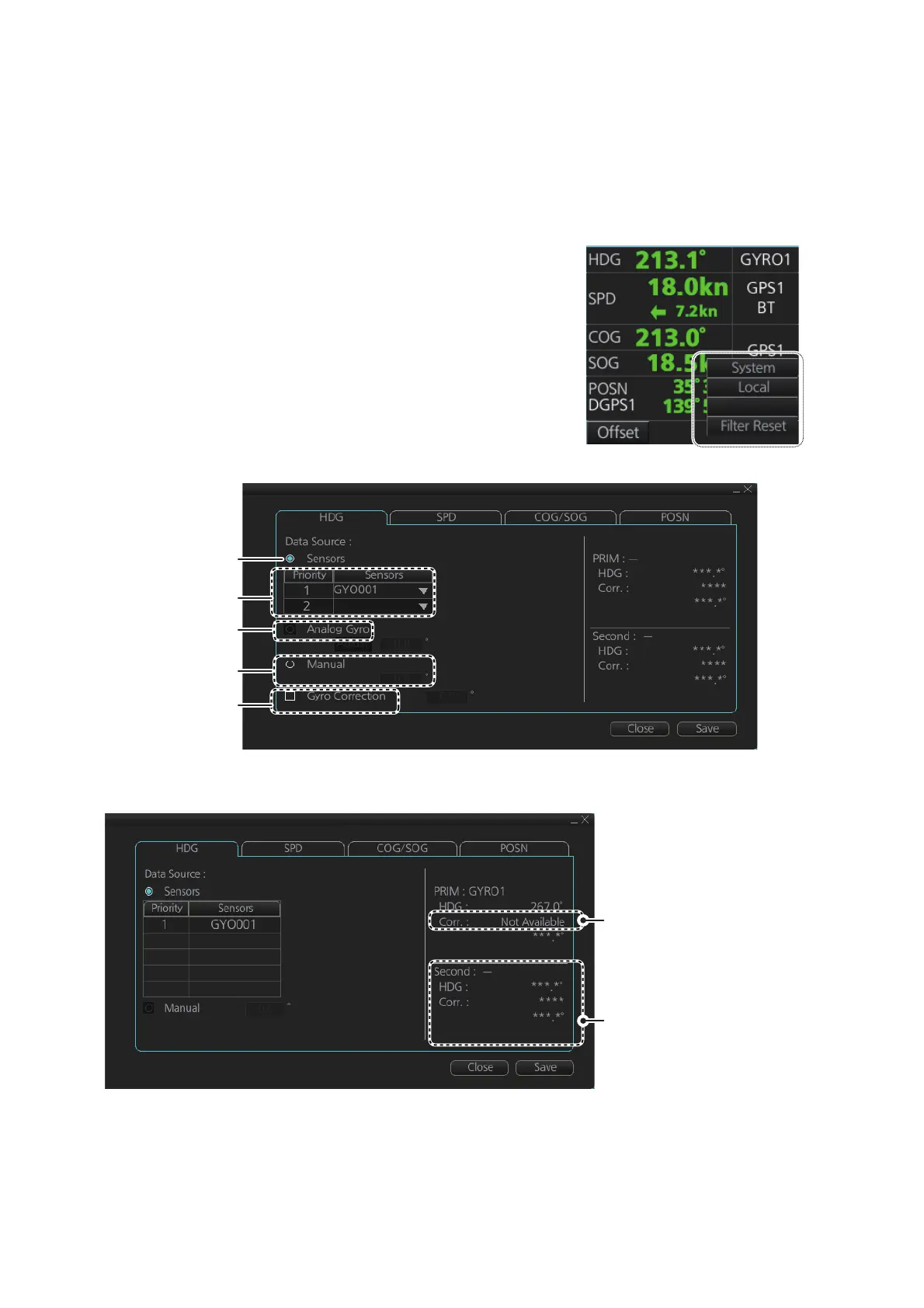
1. Right-click anywhere in the [Own ship informa-
tion] box to show the context-sensitive menu.
2. Click [Open MENU].
3. Click [System Sensor Settings] or [Local System
Settings] as applicable.
4. Click the [HDG] tab.
Open MENU
Local sensor settings
Fill for automatic
heading input
Fill for gyro
correction
Sensor list
Fill for analog
gyro
Fill for manual
heading
System sensor settings
Second appears even though
only one gyrocompass is
connected.
Gyro connection: displayed when
connected with an IEC 62065 Ed.
2 compliant autopliot.

 Loading...
Loading...










