- 119 -
6 Trial Running
6
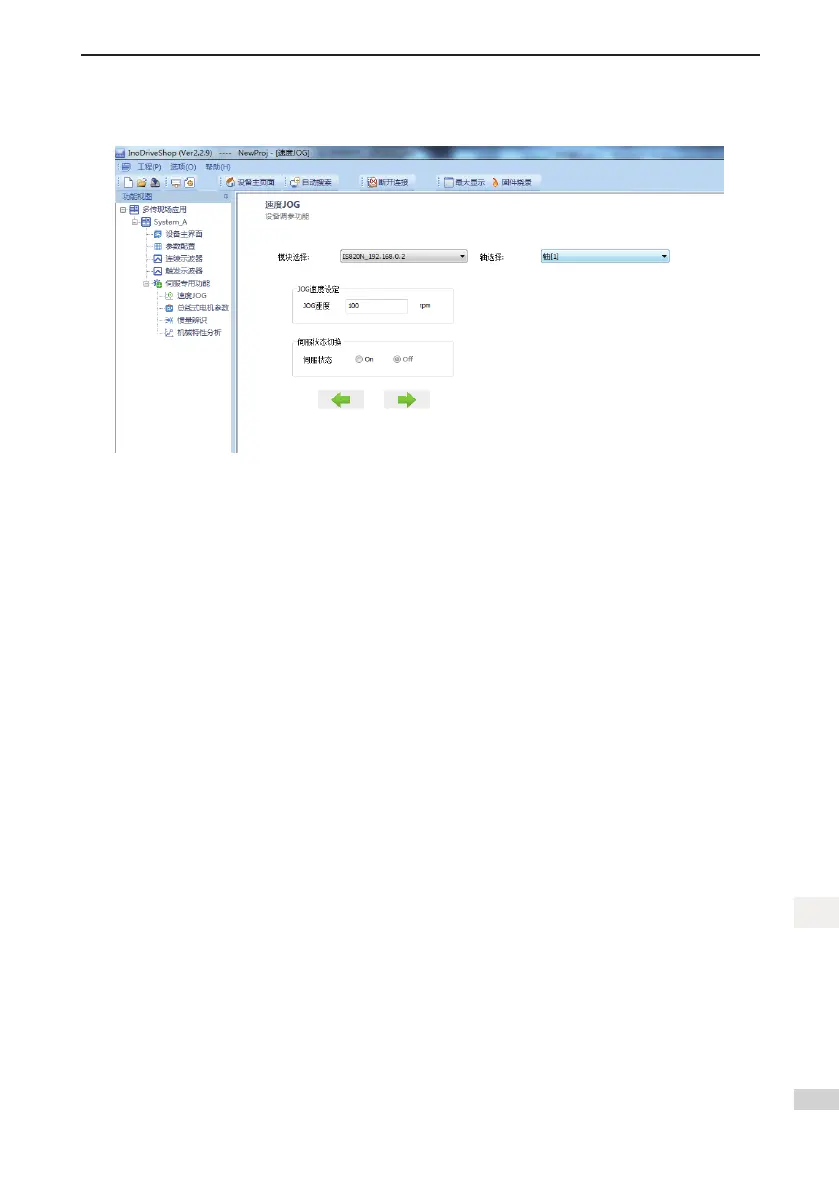
6.4.2 Jog Running
Enter Speed JOG mode operation interface, and complete jog running on 4 shafts respectively.
Functiondescription:TheSpeedJOGfunctionismainlyusedformotorspeedmodecommissioning.Select
the corresponding axis number in the axis drop-down box, set the commissioning speed in JOG speed, set
theservostatusasservoOn,thenthemotorwillbeenabled.Atthispoint,clickandholdtheleftarrowbutton
and the motor will run forward at the set JOG speed and will stop upon release. Similarly, press and hold the
right arrow button which will cause the reverse running. Set the servo status as servo Off, then the motor
will be disabled.

 Loading...
Loading...





