- 12 -
1 Servo System Selection
1
Checkthefollowingswhenusingthebuilt-indynamicbrake.
1. Asthedynamicbrakehasanemergencystopfunction,donotstopthemotorviathe
disabling signal from the servo drive. If the servo drive starts or stops via power ON/OFF
orservoON/OFFafterthecommandhasbeeninput,thedynamicbrakecircuitoperates
frequently and it will cause the deterioration and the failure of internal components of the
servo drive. At this time, start or stop the servo motor via the speed or position command.
2. Thedynamicbrakeisdesignedtomeettheshort-timeratedspecicationandcanonlybe
used for an emergency stop. Coast to stop the motor or stop the motor at zero speed in
normal circumstances. Perform the next step (re-power or re-run) within 3 minutes after
performingthedynamicbrakingwhenthemotorrotatesatahighspeed.
3. Thedynamicbrakecanbeusedwhen:
①
the control power is off,
②
the servo is powered off, or
③
the protection feature is enabled.
Parameterscanbesettoenableordisablethedynamicbrakeduringthedecelerationor
after stopping under
①
–
③
.Whenthecontrolpowerisdisconnected,thedynamicbrake
will act.
4. RefertoH02-08Parametersforfunctionsettingofdynamicbrake
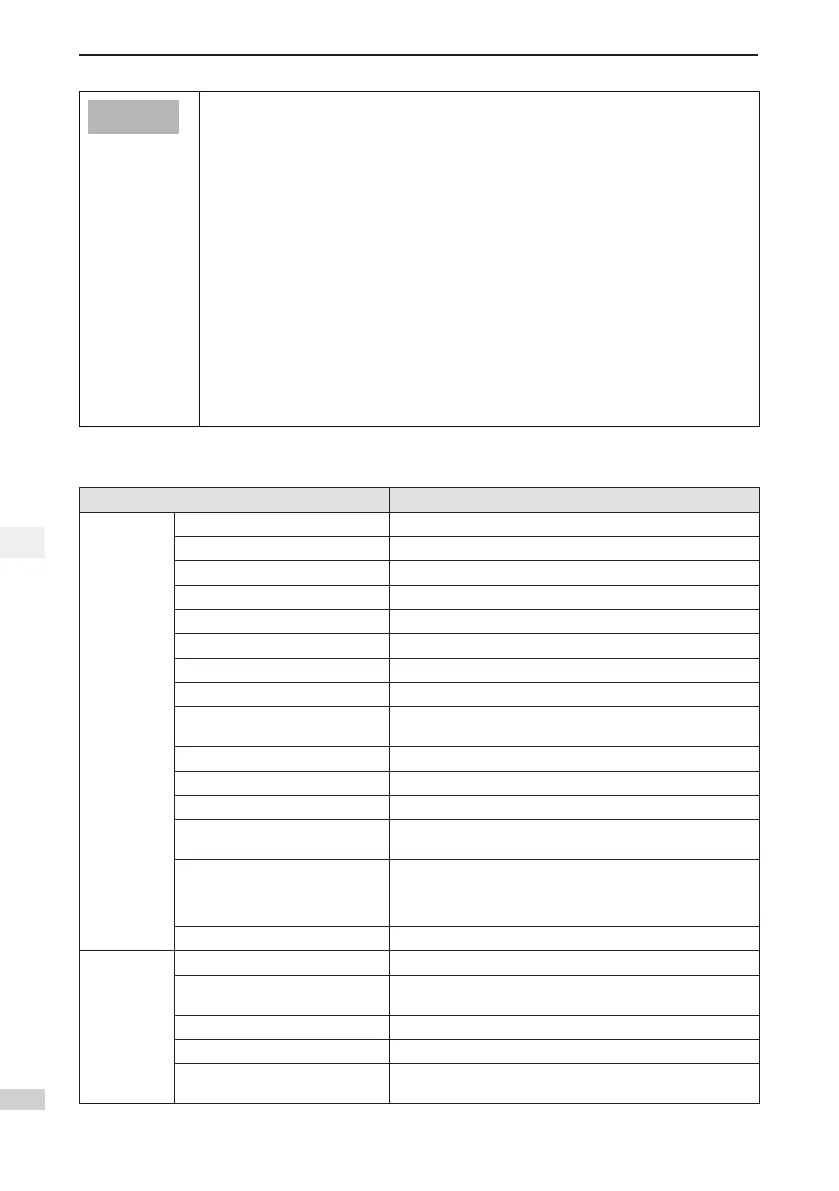
1.2.2 EtherCATCommunicationTechnicalSpecications
Item Specications
Basic
performance
of EtherCAT
slave station
Communication protocol EtherCAT protocol
Service supported CoE (PDO, SDO)
Synchronization mode DC-distributedclock
Physical layer 100BASE-TX
Baud rate 100 Mbit/s (100Base-TX)
Duplex mode Full duplex
Topological structure Ring and linear
Transmission medium Shielded CAT 5E cable or better
Transmission distance
Less than 100 m between two nodes (good environment and
cables)
Number of slave stations Support 65,535 in terms of the protocol
EtherCAT frame length 44–1,498 bytes
Process data Maximum 1,486 bytes per Ethernet frame
Synchronization jitter of two slave
stations
<1us(specicresulttobedetermined)
Update time
About 30 us for 1,000 digital inputs and outputs
100 servo axes about 100 us
Denedifferentupdatetimesfordifferentinterfaces
Communication code error rate 10-10 Ethernet standard
EtherCAT
Conguration
unit
FMMU unit 8
Storage synchronization
management unit
8
Process data RAM 8 KB
Distributedclock 64 bits
EEPROM capacity
32 Kbit
Initialization data to be written in via EtherCAT master station

 Loading...
Loading...





