- 161 -
6 Trial Running
6
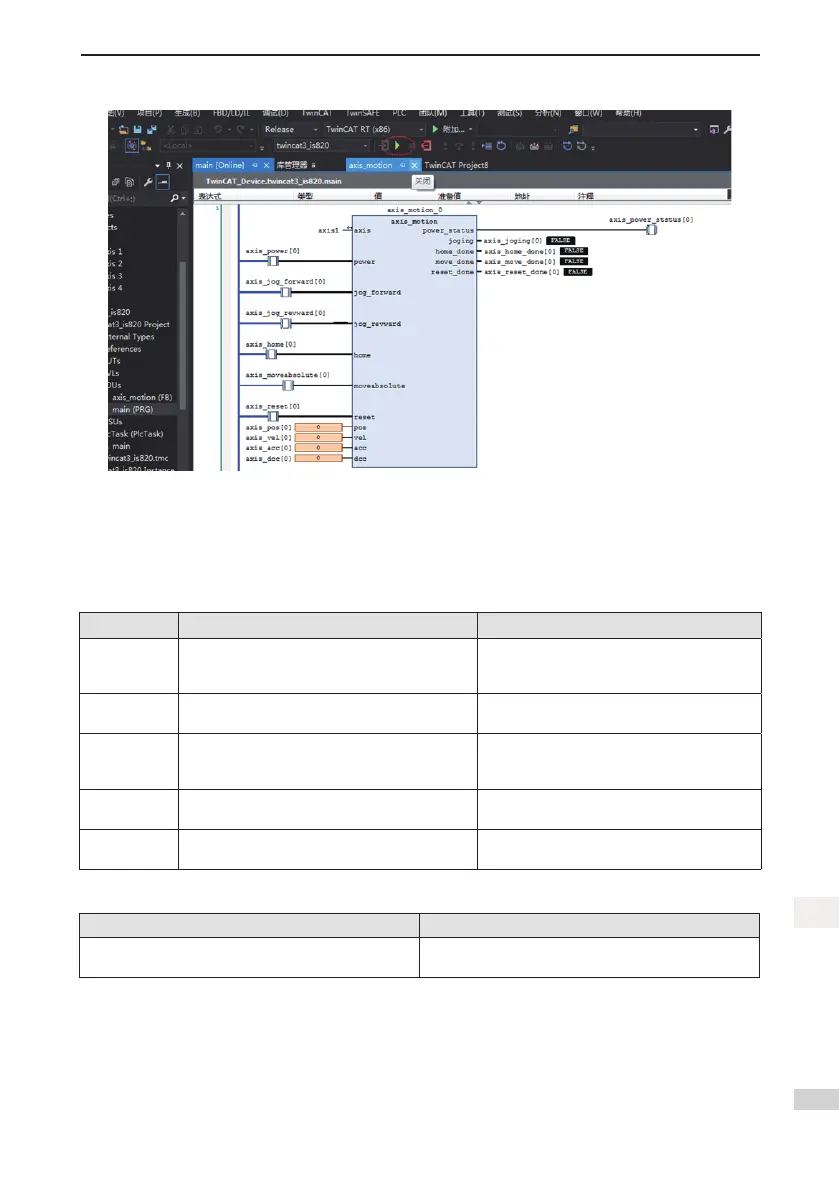
ClickandrunPLC,sothattheservodrivecanberunthroughthebus.
6.8 Servo Stop
Servo stop includes coast to stop and zero-speed stop based on the stop mode, and de-energized state and
positionlockbasedonthestopstate,asdescribedinthefollowingtable.Specicinformationisasfollows:
Table 6-2 Comparison of two stop modes
Stop Mode Stop Description Stop Characteristics
Coast to stop
The servo motor is de-energized and decelerates
to stop gradually. The deceleration time is affected
by the friction inertia and mechanical friction.
This mode features smooth deceleration and a
small mechanical impact, but the deceleration
process is long.
Stop at zero
speed
From the current speed immediately stop at 0
speed as the target speed
Thismodefeaturesquickdecelerationbuta
larger impact.
Stop according
to ramp
The speed reference stops smoothly to stop at 0
speed
Smooth deceleration and small mechanical
impact, but the deceleration process is
controllable.
Emergency
torque stop
Theservodriveoutputsthereversebraking
torque to stop
Thismodefeaturesquickdecelerationbuta
larger impact.
DBbrake Servomotorisworking
Thismodefeaturesquickdecelerationbuta
larger impact.
Table 6-3 Comparison of two stop states
De-energized State PositionLock
The motor is not energized after stopping rotation, and
the motor shaft can be rotated freely.
Themotorshaftislockedandcannotrotatedfreelyafter
the motor stops rotation.

 Loading...
Loading...





