Goodrive35 Series Closed-loop Vector Control VFD Basic operation instruction
187
PID parameter setting for detailed information) to make proportional adjustment is the only method to
PID. Set the input as 60%–70% of the permitted max value and increase gain P from 0 until the
system vibration occurs, vice versa, and record the PID value and set it to 60%–70% of the current
value. Then the gain P commission is finished.
2. Ensure the integral time Ti
After ensuring the gain P, set an original value of a bigger integral time and decrease it until the
system vibration occurs, vice versa, until the system vibration disappear. Record the Ti and set the
integral time to 150%–180% of the current value. Then integral time commission is finished.
3. Ensure the derivative time Td
Generally, it is not necessary to set Td which is 0.
If it needs to be set, set it to 30% of the value without vibration via the same method with P and Ti.
4. Commission the system with and without load and then adjust the PID parameter until it is
available.
7.15.2 PID inching
After setting the PID control parameters, inching is possible by following means:
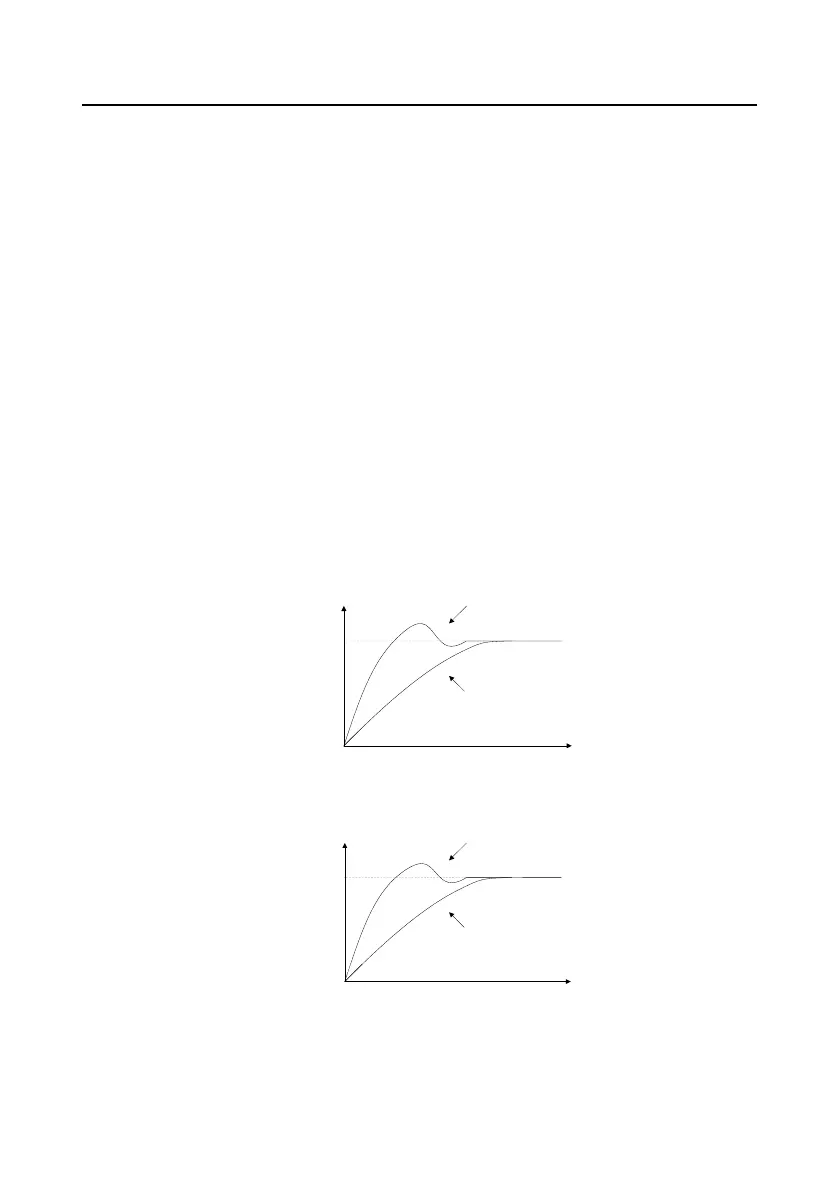
Control overmodulation: Shorten the derivative time and prolong the integral time when overshoot
occurs.
Before adjustment
After adjustment
Response
Time t
Achieve the stable state as soon as possible: Shorten the integral time (Ti) and prolong the
derivative time (Td) even the overshoot occurs, but the control should be stable as soon as possible.
Before adjustment
After adjustment
Response
Time t
Control long vibration: If the vibration periods are longer than the set value of integral time (Ti), it is
necessary to prolong the integral time (Ti) to control the vibration for the strong integration.

 Loading...
Loading...