IPE300 series engineering VFD Function parameter list
-212-
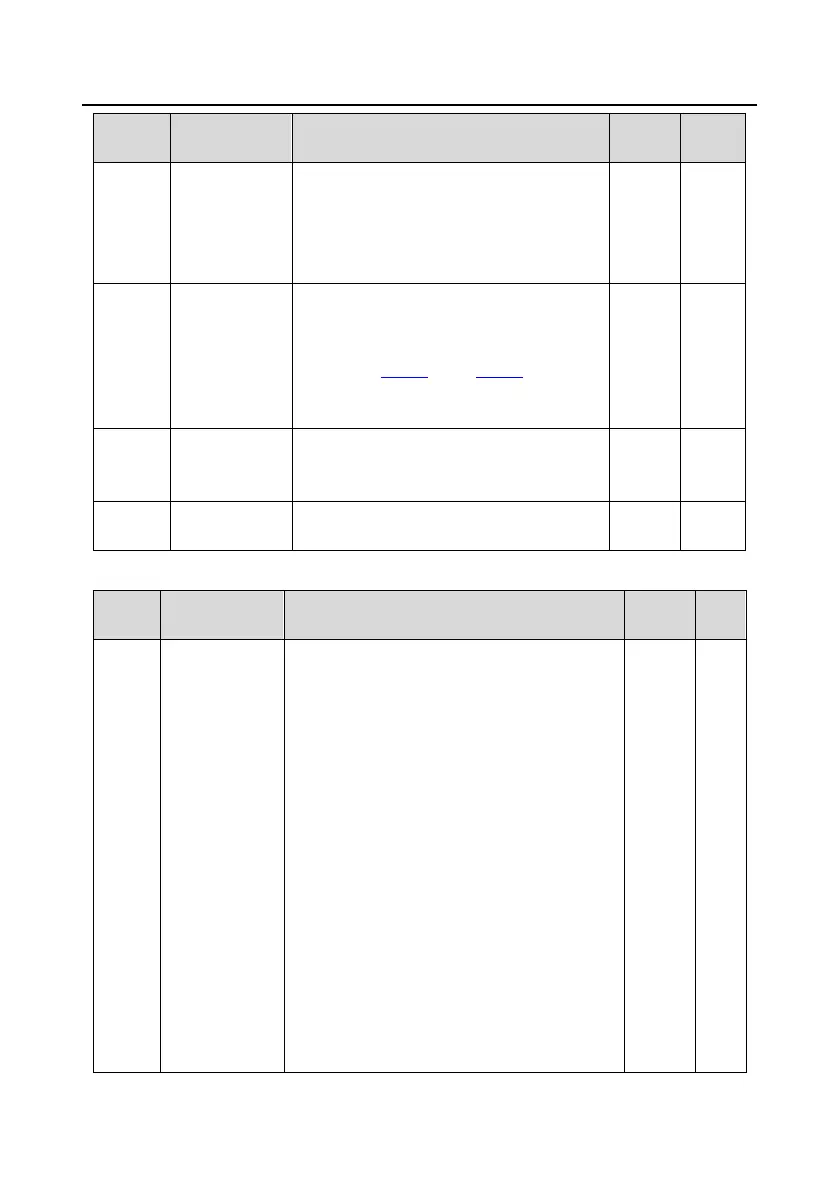
4. Output terminal function 28 (during pulse
superposition)
During the pulse superposition, the output
terminal is valid. After the pulse superposition
is completed, the output terminal is invalid.
Speed
feedforward
filtering time
constant (pulse
string-based
speed mode)
Filter time constant detected by the pulse string
when the speed reference source is set to the
pulse string (P00.06=12 or P00.07=12).
Setting range: 0–3200.0ms
Numberator of
the 2nd
command ratio
P22 group––Spindle positioning
Spindle
positioning mode
selection
Bit0: Enable spindle positioning
0: Disable
1: Enable
Bit1: Select spindle positioning reference point
0: Z pulse input
1: S2/S3/S4 terminal input
Bit2: Search for reference point
0: Search the reference point only once
1: Search the reference point every time
Bit3: Enable reference point calibration
0: Disable
1: Enable
Bit4: Positioning mode selection 1
0: Set direction positioning
1: Near-by direction positioning
Bit5: Positioning mode selection 2
0: Forward positioning
1: Reverse positioning
 Loading...
Loading...