Function block library
7-177
SHB9300CRV EN 2.0
7.6.55.1 Control characteristic
l
In the default setting, the PID algorithm is active.
l
The D-component can be deactivated by setting code C0224 to zero. Thus, the controller
becomes a PI-controller (or P-controller if the I-component is also switched off).
l
TheI-componentcanbeswitchedonoroffonlineviathePCTRL-I-OFFinput.Forthis,the
input is assigned a digital signal source (e.g. one of the freely assignable digital input
terminals). If the I-component is to be switched off permanently, the input is assigned the
signal source ”FIXED1”.
– PCTRL-I-OFF = HIGH switched off the I-component
– PCTRL-I-OFF = LOW switches on the I-component
l
The adjustment time is parameterized via C0223.
l
The P-gain can be set in different ways. The function for the provision of the P-gain is selected
under C0329:
– C0329 = 0
The P-gain is entered under C0222.
– C0329 = 1
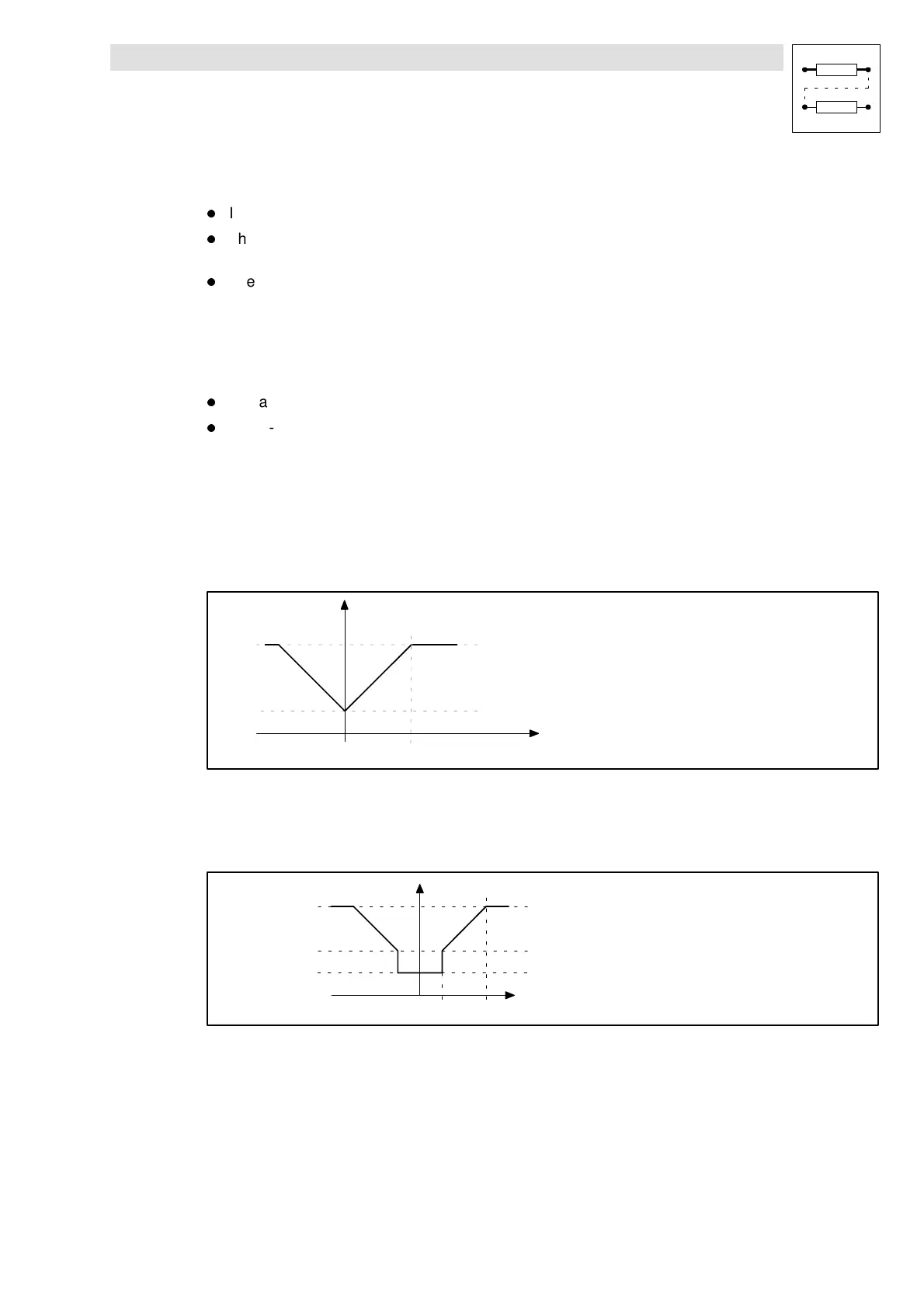
The P-gain is entered via the PCTRL-ADAPT input. The input value is led via a linear
characteristic. The shape of the characteristic is set under C0222 (upper limit) and C0325
(lower limit). The value under C0222 is valid if the input value = +100 % or -100 %. The value
under C0325 is valid if the input value = 0 %.
0
100%
PCTRL-ADAPT
V
p
V
p1
V
p2
Input data:
V
p1
= C0222
V
p2
= C0325
Display value:
V
pakt
= C0336
Fig. 7-138 Input of the P-gain via PCTRL-ADAPT input
– C0329 = 2
The P-gain is derived from the process setpoint PCTRL-SET. The setpoint is obtained after
the ramp generator and calculated via the characteristic with three coordinates.
V
p
V
p1
V
p2
V
p3
s
s
0
s
1
Input data:
V
p1
= C0222
V
p2
= C0325
V
p3
= C0326
s
0
= C0328
s
1
= C0327
Display value:
V
pakt
= C0336
Fig. 7-139 Input of the P-gain derived from the PCTRL-SET process setpoint
– C0329 = 3
The input of the P-gain is derived from the control difference and led by the characteristic
generation as C0329 = 2.
 Loading...
Loading...