Function block library
7-184
SHB9300CRV EN 2.0
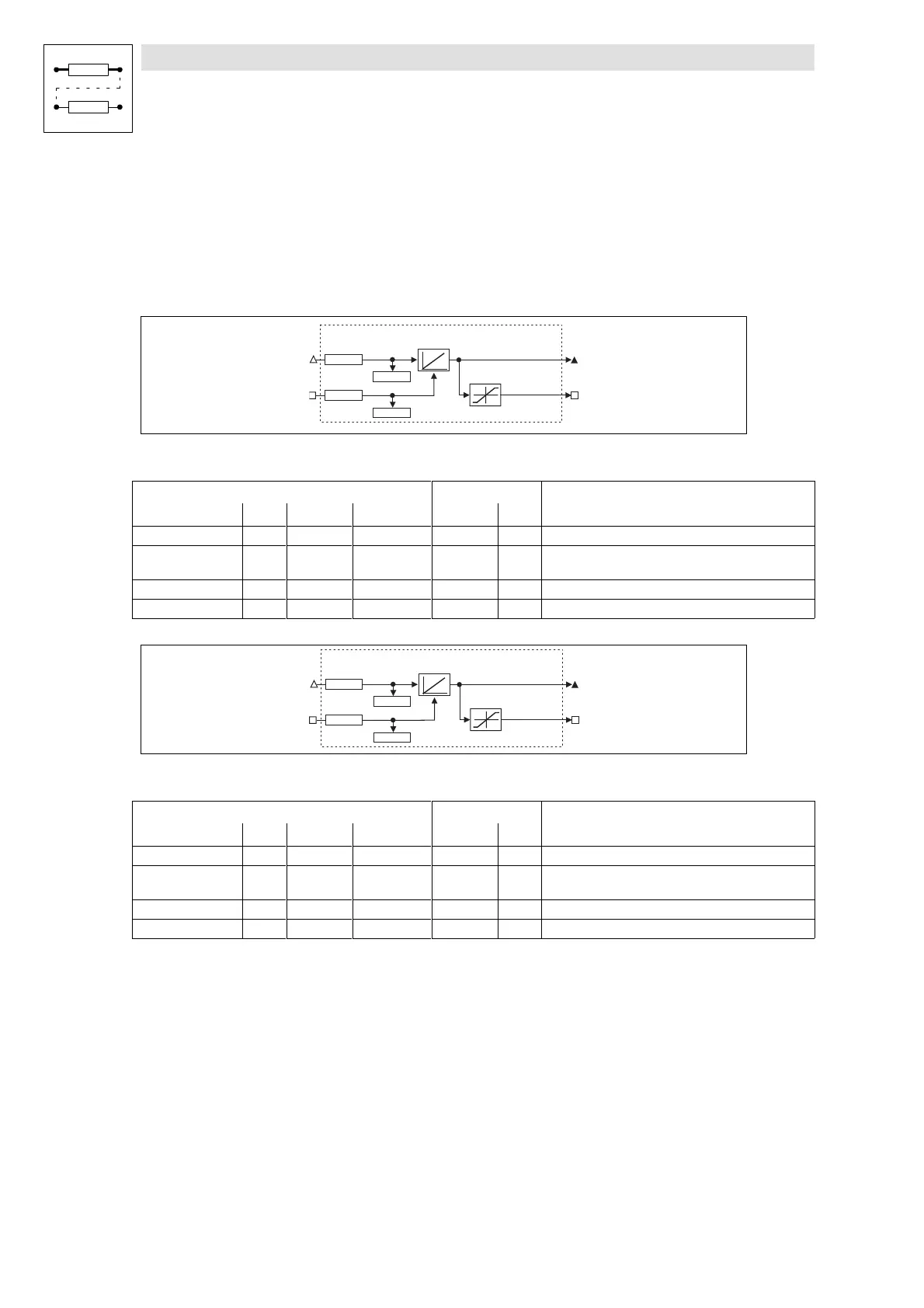
7.6.60 Phase integrator (PHINT)
Purpose
Integrates a speed or a velocity to a phase (distance). The integrator can accept max. ±32000
encoder revolutions.
PHINT3 can recognize a relative distance.
C 0992
PHINT1
PHINT1-O UT
PHINT1-IN
C 0993
PHINT1-RESET
C 0990
C 0991
±
32000
Revolution
PHINT1-FAIL
Fig. 7-148 Phase integrator (PHINT1)
Signal
Source Note
Name Type DIS DIS format CFG List
PHINT1-IN phd C0992 dec [rpm] C0990 4 1 revolution = 65536 increments
PHINT1-RESET d C0993 bin C0091 2 HIGH = sets the phase integrator to 0 and PHINT1-FAIL =
LOW
PHINT1-OUT ph - - - - 65536 inc = 1 encoder revolution, overflow is possible
PHINT1-FAIL d - - - - HIGH = overflow
C 1032
PHINT2
PHINT2-O UT
PHINT2-IN
C 1033
PHINT2-RESET
C 1030
C 1031
±
32000
Revolution
PHINT2-FAIL
Fig. 7-149 Phase integrator (PHINT2)
Signal
Source Note
Name Type DIS DIS format CFG List
PHINT2-IN phd C1032 dec [rpm] C1030 4 1 revolution = 65536 increments
PHINT2-RESET d C1033 bin C1031 2 HIGH = sets the phase integrator to zero and
PHINT2-FAIL = LOW
PHINT2-OUT ph - - - - 65536 inc = 1 encoder revolution, overflow is possible
PHINT2-FAIL d - - - - HIGH = overflow
 Loading...
Loading...