Function block library
7-194
SHB9300CRV EN 2.0
Scope of function
l
Profile generator
l
Homing modes
l
Control via input signals
l
Output of status signals
l
Speed/digital frequency input and output
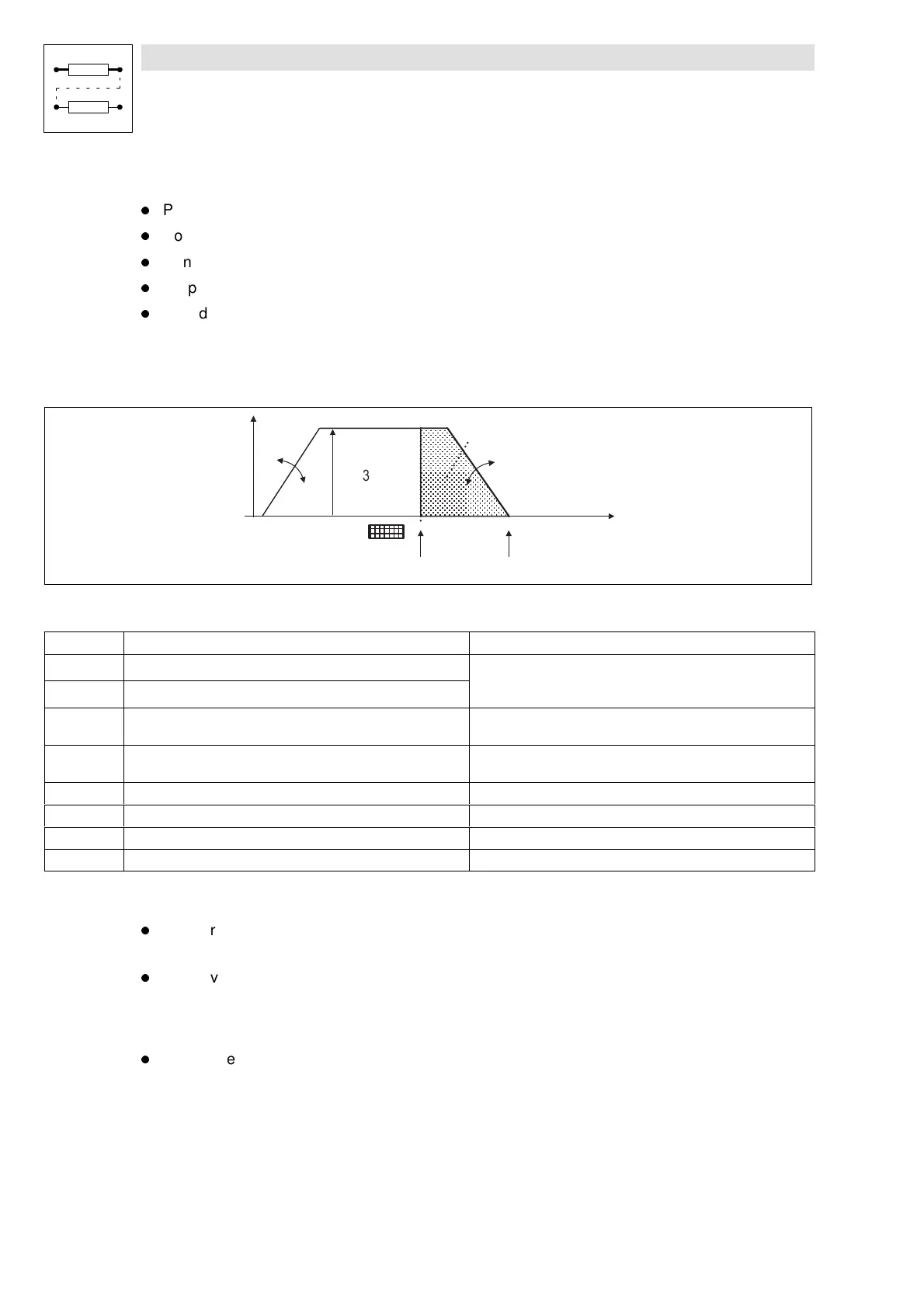
7.6.64.1 Profile generator
The speed profile for homing can be adapted to the application.
t
C0935
C0936
C0936
REF-MARK
h o m e p o s itio n o ffs e t C 0 9 3 4
zero im
ulse hom e
o s itio n
Fig. 7-158 Speed profile for homing
Code
Mean in g Note
C0930 Gear factor numerator, pinion circumference - motor side Adj ustme nt onl y re qui re d i f the a c t ua l va l ue e nc ode r i s not mounte d to
C0931 Ge a r fac tor de nomina t or, pini on ci rc umfe re nc e - e nc ode r side
C0933 Ca lc ul ate the positi on for the ri si ng or de c re asing t ra nsi ti on of the z ero
tra ck or t ou ch p r ob e
Depending on the mode se lec te d.
C0934 Home posi ti on offse t = number of i nc rement s a ft e r t he z ero pulse ha s
occured
Re fe rence : 65536 inc = 1 rev. Input up to 2140000000 inc possible
C0935 Ma x. traversi ng spe ed Input i n [%] of nma x C0011
C0936 Decelera tion/accele ration Linear ramp
C0926/3 REFC-ACTPOS, actual position value Only display
C0926/4 REFC-TARGET, actual target position Only display
The profile generator c alculates the speed profile from the set profile parameters.
l
The parameters can be changed during homing.
– C0935 and C0936 become effective if REFC-ON = LOW.
l
The drive should not run at the torque limit (MCTRL-MMAX = HIGH)otherwise the drive might
not be able to follow the speed profile.
– Prolong acceleration / deceleration time C0936 until MCTRL-MMAX does not respond any
more.
l
The phase controller in FB MCTRL must be activated.
 Loading...
Loading...