Function block library
7-201
SHB9300CRV EN 2.0
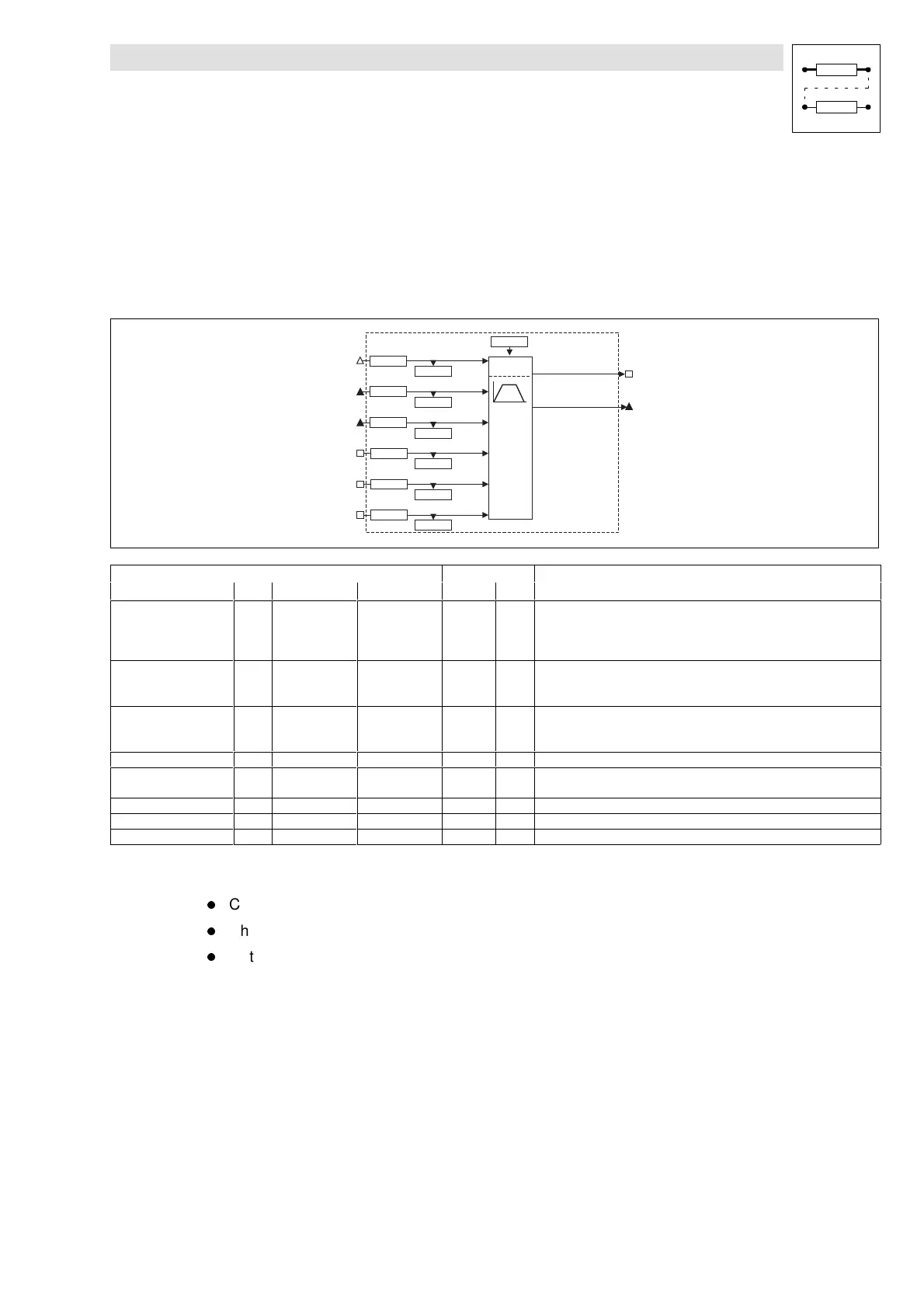
7.6.66 Ramp function generator for phase signals (RFGPH)
One function block (RFGPH) is available.
Purpose
Path or timecontrolled (jump)applicationto changeposition/phase (e.g.offset)relativeto themaster
drive.
RFGPH1-OUT
RFGPH1
C 1408/1
RFGPH1-RFG-0
RFGPH1-IN
RFGPH1-RFG-I=O
CTRL
RFGPH1-DFIN
C 1402/1
C 1400/3
C 1401/3
C 1404/1
C 1403/1
C 1405/1
RFGPH1-DIST
C 1402/2
C 1403/2
RFGPH1-T/DIST
C 1400/2
C 1401/2
RFGPH1-RESET
C 1400/1
C 1401/1
Signal Source
Note
Name Type DIS DIS format CFG List
RFGPH1-RESET d 1401/1 bin 1400/1 2 HIGH = sets RFGPH1-OUT = 0 (jump)
LOW= RFGPH1-OUT is set to the value at RFGPH1-IN according to the
selected function
Input has priority over RFGPH1-RFG-0
RFGPH1-RFG-0 d 1401/2 bin 1400/2 2 HIGH = proceeds according to the selected function RFGPH1-OUT = 0
LOW= RFGPH1-OUT is set to the value at RFGPH1-IN according to the
selected function
RFGPH1-T/DIST d 1401/3 bin 1400/3 2 Function changeover
HIGH = path-based path change
LOW= time-based path change
RFGPH1-IN ph 1403/1 dec [inc] 1402/1 3 Position setpoint (65536 inc = 1 rev.)
RFGPH1-DIST ph 1403/2 dec [inc] 1402/2 3 Path difference by which the phase is to be changed at input -IN
(65536 inc = 1 rev.)
RFGPH1-DFIN phd 1405/1 dec [inc] 1404/1 4 Digital frequency input
RFGPH1-RFG-I= 0 d - - - HIGH : RFGPH1 -OUT = RFGPH1 -IN
RFGPH1-OUT ph - - - Output (65536 inc = 1 rev.)
Function
l
Change phase/position through a defined speed
l
Change phase/position through a defined path
l
Output of status signals
Description of functions by means of an example
With the function “ramp function generator for phase signals” the drive can be moved by a defined
distance compared to the master drive. It must be determined whether the drive reaches the target
position with a predefined speed (-T/DIST = LOW)or - depending on the master drive speed - after
a certain distance (-T/DIST = HIGH).
Example: The drive is to be moved by 5 m-units starting with the 0 position of the profile. The
controller is enabled via terminal X5/E1.
Masterunits (m-units)canmeasureddirectlyinthesystemattheobjecttobemoved.Possiblearemm,
m, phases, etc. Referred to the motor, these actual values become slave units (s-units). The controller
converts the s-units into encoder increments.