155
5. PARAMETERS
5.3 Speed control under PM motor control
3
4
5
5
5
6
7
8
9
10
5.3.2 Performing high-accuracy, fast-response control (gain
adjustment for PM motor control)
Manual gain adjustment is useful for achieving optimum machine performance or improving unfavorable conditions, such as
vibration and acoustic noise during operation with high load inertia or gear backlash.
Adjusting the speed control gain manually
• The speed control gain can be adjusted for the conditions such as abnormal machine vibration, acoustic noise, slow
response, and overshoot.
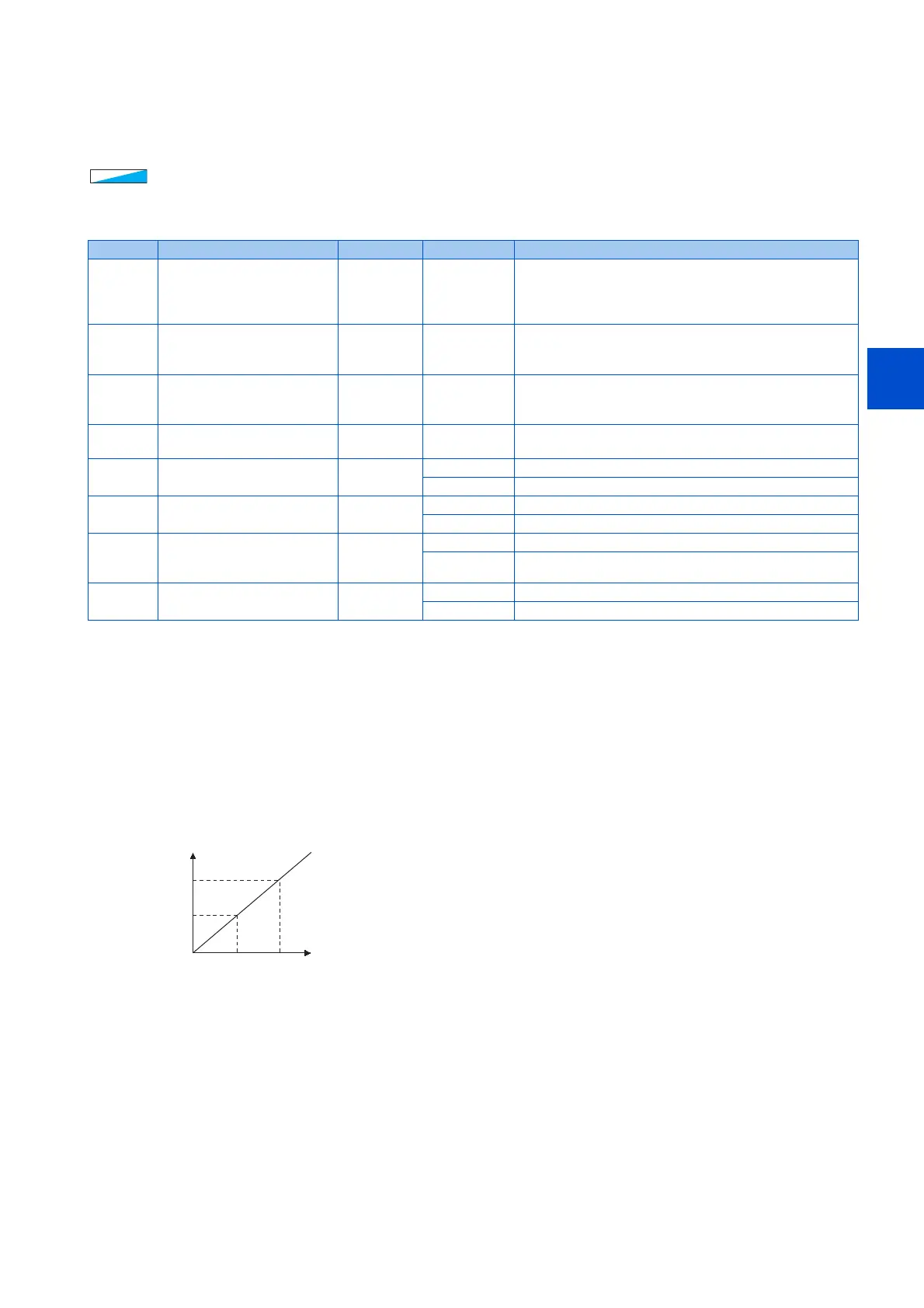
• Pr.820 Speed control P gain 1="25% (initial value)" is equivalent to 50 rad/s (speed response of a single motor).
(Equivalent to the half the rad/s value with the FR-F860-01080 or higher.) Setting this parameter higher speeds up the
response, but setting this too high causes vibration and acoustic noise.
• Setting Pr.821 Speed control integral time 1 lower shortens the return time to the original speed during speed fluctuation,
but setting it too low causes overshoot.
*1 The value in parentheses is applicable with the FR-F860-01080 or higher.
Pr. Name Initial value Setting range Description
820
G211
Speed control P gain 1 25% 0 to 1000% The proportional gain during speed control is set. (Setting this
parameter higher improves the trackability for speed
command changes. It also reduces the speed fluctuation
caused by external disturbance.)
821
G212
Speed control integral time 1 0.333 s 0 to 20 s The integral time during speed control is set. (Setting this
parameter lower shortens the return time to the original speed
when the speed fluctuates due to external disturbance.)
824
G213
Torque control P gain 1
(current loop proportional
gain)
50% 0 to 500% The proportional gain of the current controller is set.
825
G214
Torque control integral time
1 (current loop integral time)
40 ms 0 to 500 ms The integral time of the current controller is set.
830
G311
Speed control P gain 2 9999 0 to 1000% Second function of Pr.820 (valid when RT signal is ON)
9999 The Pr.820 setting is applied to the operation.
831
G312
Speed control integral time 2 9999 0 to 20 s Second function of Pr.821 (valid when RT signal is ON)
9999 The Pr.821 setting is applied to the operation.
834
G313
Torque control P gain 2
(current loop proportional
gain)
9999 0 to 500% Second function of Pr.824 (valid when RT signal is ON)
9999 The Pr.824 setting is applied to the operation.
835
G314
Torque control integral time
2 (current loop integral time)
9999 0 to 500 ms Second function of Pr.825 (valid when RT signal is ON)
9999 The Pr.825 setting is applied to the operation.
Pr.820
Setting
100%
25%
(initial value)
Proportional gain
200 (100) rad/s
50 (25) rad/s
∗1
∗1

 Loading...
Loading...






