Safety
Information
Introduction
Product
Information
System
configuration
Mechanical
Installation
Electrical
Installation
Getting
Started
Basic
parameters
Running
the motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
Data
Diagnostics
UL Listing
Information
260 Unidrive SPM User Guide
www.controltechniques.com Issue Number: 3
If Pr 6.04 is changed then a drive reset is required before the function of
T25, T26 or T27 will become active.
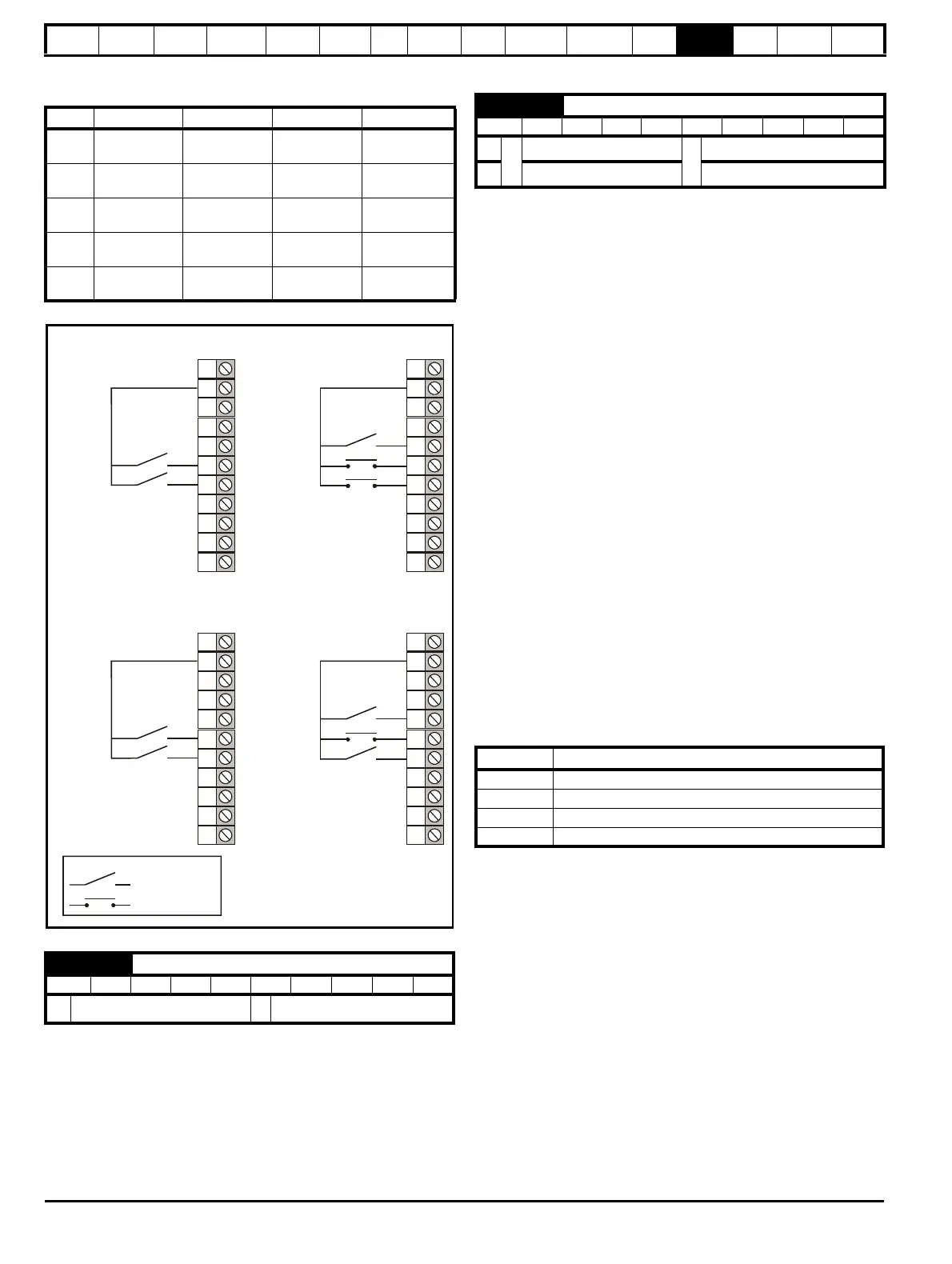
Figure 13-47 Digital input connections when Pr 6.04 is set to 0 to 3
This parameter enables sequencer latching. When sequencer latching is
used, a digital input must be used as a run permit or not stop input. The
digital input should write to Pr 6.39. The run permit or not stop input must
be made active to allow the drive to run. Making the run permit or not
stop input inactive resets the latch and stops the drive.
13.21.8 Catch a spinning motor
Open-loop
When the drive is enabled with this parameter at zero, the output
frequency starts at zero and ramps to the required reference. When the
drive is enabled with this parameter at a non-zero value, the drive
performs a start-up test to determine the motor speed and then sets the
initial output frequency to the synchronous frequency of the motor.
The test is not carried out and the motor frequency starts at zero if one of
the following is true.
• The run command is given when the drive is in the stop state
• The drive is first enabled after power-up with Ur_I voltage mode
(Pr 5.14 = Ur_I).
• The run command is given with Ur_S voltage mode (Pr 5.14 =
Ur_S).
With default parameters the length of the test is approximately 250ms,
however, if the motor has a long rotor time constant (usually large
motors) it may be necessary to extend the test time. The drive will do this
automatically if the motor parameters including the rated load rpm are
set up correctly for the motor.
For the test to operate correctly it is important that the stator resistance
(Pr 5.17 or Pr 21.12) is set up correctly. This applies even if fixed boost
(Pr 5.14 = Fd) or square law (Pr 5.14 = SrE) voltage mode is being used.
The test uses the rated magnetising current of the motor during the test,
therefore the rated current (Pr 5.07, Pr 21.07 and Pr 5.10, Pr 21.10) and
power factor should be set to values close to those of the motor,
although these parameters are not as critical as the stator resistance.
For larger motors it may be necessary to increase Pr 5.40 Spin start
boost from its default value of 1.0 for the drive to successfully detect the
motor speed.
It should be noted that a stationary lightly loaded motor with low inertia
might move slightly during the test. The direction of the movement is
undefined. Restrictions may be placed on the direction of this movement
and on the frequencies detected by the drive as follows:
Closed-loop vector and Servo
When the drive is enabled with this bit at zero, the post ramp reference
(Pr 2.01) starts at zero and ramps to the required reference. When the
drive is enabled with this bit at one, the post ramp reference is set to the
motor speed.
When closed-loop vector mode is used without position feedback, and
catch a spinning motor is not required, this parameter should be set to
zero as this avoids unwanted movement of the motor shaft when zero
speed is required. When closed-loop vector mode without position
feedback is used with larger motors it may be necessary to increase
Pr 5.40 Spin start boost from its default value of 1.0 for the drive to
successfully detect the motor speed.
Pr 6.04 T25 T26 T27 Pr 6.40
0 No Function
Pr 6.30
(Run Forward)
Pr 6.32
(Run Reverse)
0
(Non Latching)
1
Pr 6.39
(Run Permit)
Pr 6.30
(Run Forward)
Pr 6.32
(Run Reverse)
1
(Latching)
2 No Function
Pr 6.34
(Run)
Pr 6.33
(Fwd/Rev)
0
(Non Latching)
3
Pr 6.39
(Run Permit)
Pr 6.34
(Run)
Pr 6.33
(Fwd/Rev)
1
(Latching)
4
User
programmable
User
programmable
User
programmable
User
programmable
6.40 Enable sequencer latching
RW Bit US
Ú
OFF (0) or On (1)
Ö
OFF (0)
30
31
28
29
26
27
24
25
23
21
22
+24V
Run Fwd
Run Rev
Pr 6.04 is set to 0
30
31
28
29
26
27
24
25
23
21
22
+24V
Run Fwd
Run Rev
Pr 6.04 is set to 1
Run Permit
30
31
28
29
26
27
24
25
23
21
22
+24V
Run
Fwd/Rev
Pr 6.04 is set to 2
30
31
28
29
26
27
24
25
23
21
22
+24V
Run
Fwd/Rev
Pr 6.04 is set to 3
Run Permit
Momentary contact
Continuous contact
Key
6.09 Catch a spinning motor
RW Uni US
OL
Ú
0 to 3
Ö
0
CL 0 to 1 1
Pr 6.09 Function
0 Disabled
1 Detect all frequencies
2 Detect positive frequencies only
3 Detect negative frequencies only

 Loading...
Loading...








