563
5. PARAMETERS
5.13 (G) Control parameters
3
4
5
5
5
6
7
8
9
10
5.13.13 Slip compensation
Slip of the motor is estimated from the inverter output current at the time of V/F control, and maintain the rotation of the motor
constant.
• Slip compensation will become enabled by calculating the rated motor slip, and setting to Pr.245. Slip compensation is not
performed when Pr.245 = "0, 9999".
NOTE
• When the slip compensation is performed, the output frequency may become larger than the set frequency. Set Pr.1
Maximum frequency higher than the set frequency.
• Slip compensation will be disabled in following cases. At the times of stall preventive (oL, OL) operation, regeneration
avoidance operation, auto tuning
Pr.1 Maximum frequency page 253
Pr.3 Base frequency page 539
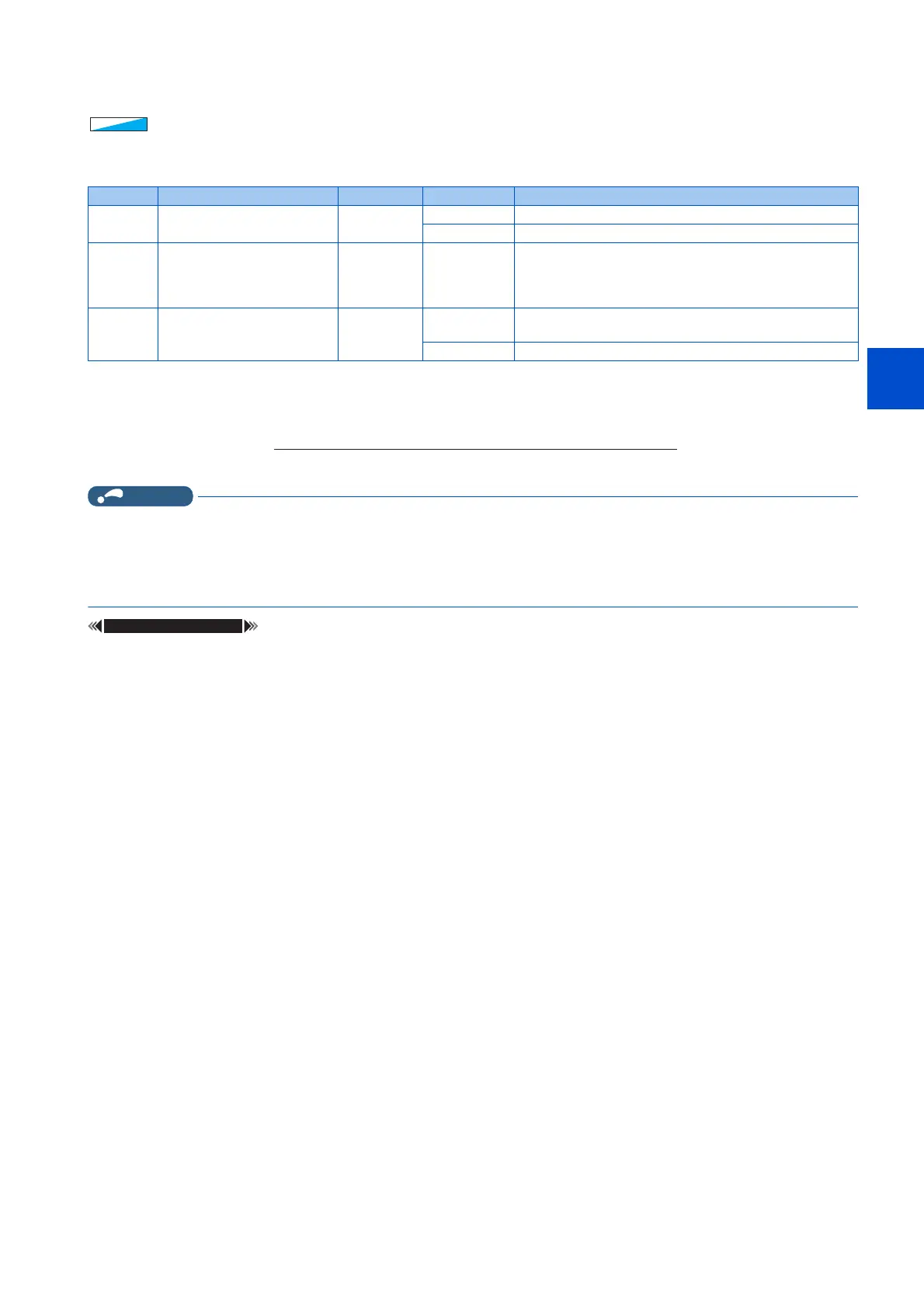
Pr. Name Initial value Setting range Description
245
G203
Rated slip 9999 0.01 to 50% Set the rated motor slip.
0, 9999 Without slip compensation
246
G204
Slip compensation time
constant
0.5 s 0.01 to 10 s Set the response time of the slip compensation. Response
will become faster when the value is lowered, but the
regenerative overvoltage (E.OV[]) error will occur more
frequently when the load inertia is larger.
247
G205
Constant-power range slip
compensation selection
9999 0 Do not perform slip compensation at constant output range
(frequency range higher than the frequency set in Pr.3).
9999 Perform the slip compensation of the constant output range.
Synchronized speed at the time of base frequency - rated rotation speed
Synchronized speed at the time of base frequency
× 100 [%]
Rated slip =
Parametersreferredto

 Loading...
Loading...






