6-32
6
Starting Torque Compensation Function (C4-03 to C4-05)
A starting torque compensation can be applied to speed up the torque establishment at start in Open Loop Vec-
tor control.
Related Parameters
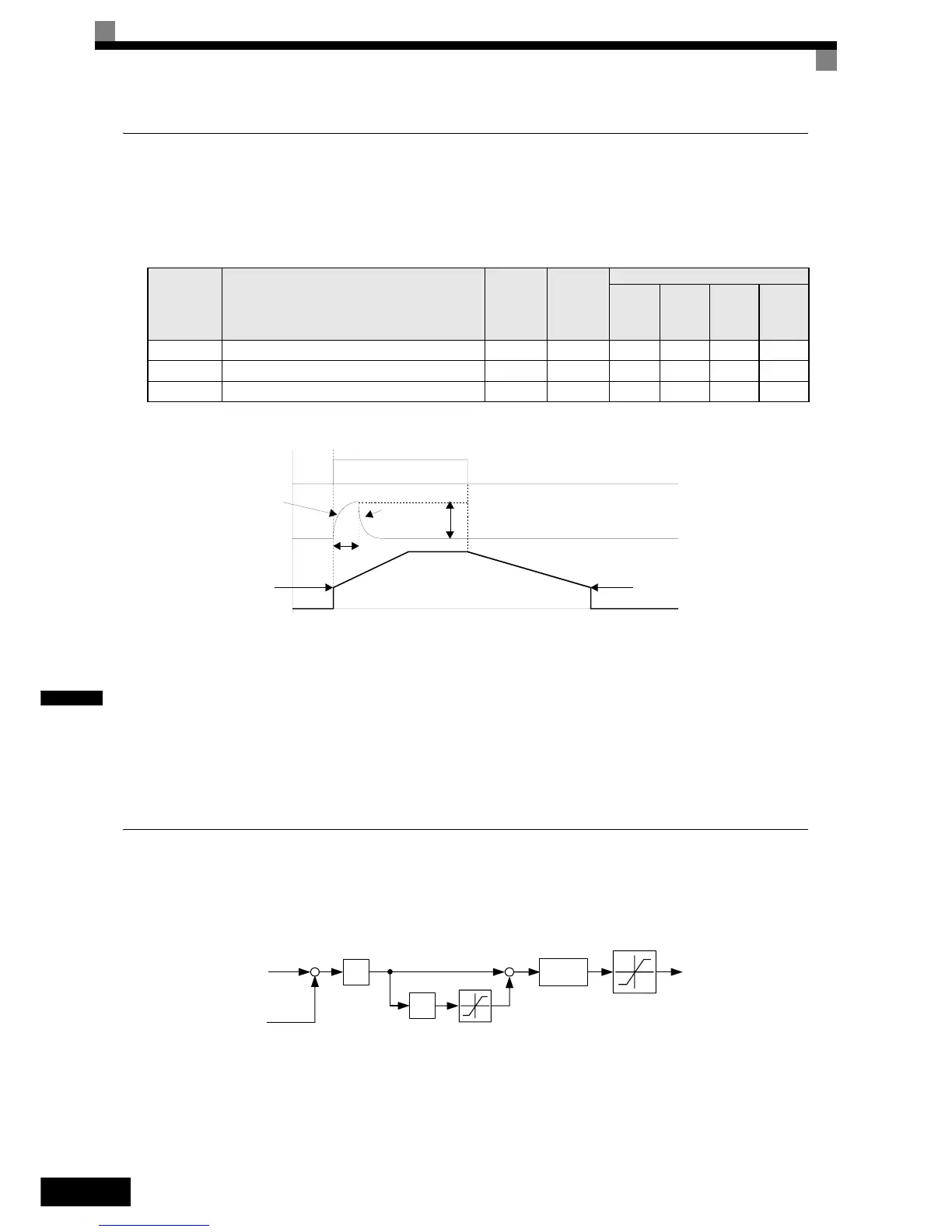
It works like shown in the following diagram.
Fig 6.10 Time Chart for Starting Torque Frequency
When this function is used, the following should be considered:
• Both values, C4-03 and C4-04 have to be set.
• The compensation works for motoring operation only. It can not be used for regenerative operation.
• If the starting torque compensation is used and a large shock is generated at the start, increase the starting
torque compensation time constant (C4-05)
• The function can be not be used unrestricted for elevators, since the load is not know before the start.
Automatic Speed Regulator (ASR) (Closed Loop Vector only)
In Closed Loop Vector control the automatic speed regulator (ASR) adjusts the torque reference in order to
eliminate the deviation between the speed reference and the measured speed (PG feedback). The ASR settings
determine the motor speed accuracy and stability. Fig 6.11 shows the ASR structure.
Fig 6.11 ASR Block Diagram
Parameter
No.
Name
Factory
Setting
Change
during
Operation
Control Methods
V/f
Open
Loop
Vector
Closed
Loop
Vector
Closed
Loop
Vector
(PM)
C4-03 Starting torque compensation value (forward direction) 0.0 No - A - -
C4-04 Starting torque compensation value (reverse direction) 0.0 No - A - -
C4-05 Starting torque compensation time constant 1 ms No - A - -
OFF
ON
Forward (Reverse) Run command
Time constant: C4-05
Time constant: C4-02
C4-05 x 4
Torque compensation
volume
E1-09
Output frequency
E1-09
C4-03 (forward)
C4-04 (reverse, negative polarity)
P
I
+
-
+
+
Delay
Time
Frequency
Reference
Motor
Speed
C5-01/03/09
C5-02/04/10
C5-08
I-Limit
Torque
Limits
Torque
Reference
 Loading...
Loading...






