6-34
6
• Increase C5-09 if ASR is slow in the low speed area or if undershooting occurs at leveling speed. If vibra-
tions occur in the low speed area during deceleration decrease the value.
Adjusting ASR Integral Times (C5-02/04/10)
The integral time determines how fast the ASR input is integrated in order to eliminate the speed deviation.
Lengthening the integral time lowers the responsiveness of the ASR and the speed accuracy when the load
changes suddenly. Oscillations can occur if the setting of this value is too low.
• Decrease C5-02 if a speed deviation is compensated too slow at high speeds or if overshooting occurs at
speed changes in the high speed area. Increase it if vibrations occur.
• Decrease C5-04 if a speed deviation is compensated too slow at start or at very low frequencies. Increase it
if vibrations occur.
• Decrease C5-10 if a speed deviation is compensated too slow in the low speed area at leveling or if under-
shooting occurs at leveling speed. If vibrations occur in the low speed area during deceleration increase the
value.
Adjusting the ASR Gain for Encoder Offset Tuning (C5-11)
During the encoder offset tuning for Hiperface
y
or EnDat uses the value of parameter C5-11 as ASR gain.
• Decrease C5-11 if vibrations occur during the tuning and repeat the tuning.
• Increase C5-11 if the accuracy of the tuning is low and repeat the tuning.
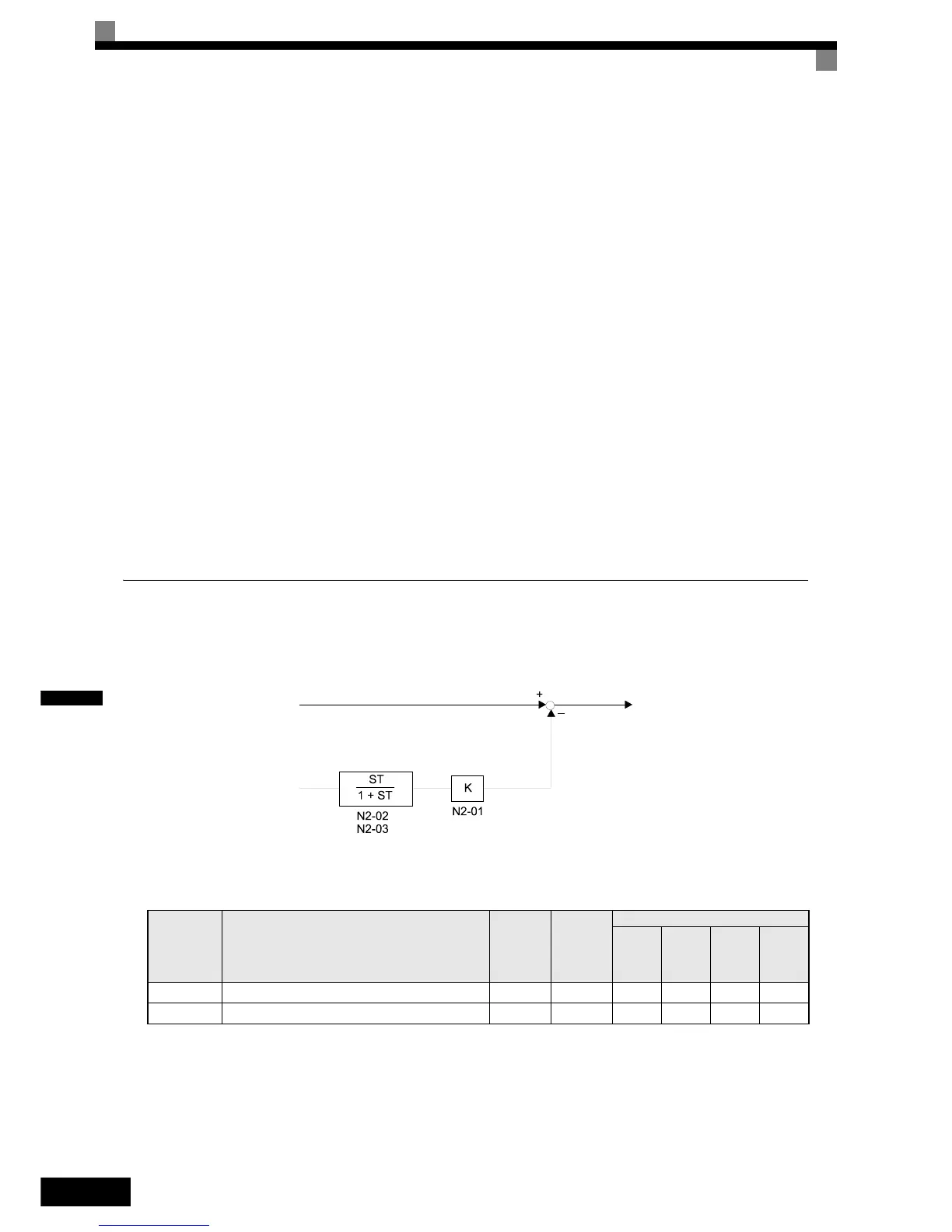
Stabilizing Speed (Automatic Frequency Regulator) (Open Loop Vector)
The speed feedback detection control (AFR) function controls the stability of the speed when a load is sud-
denly applied or removed. It calculates the amount of speed fluctuation using the torque current (Iq) feedback
value and compensates the output frequency with the amount of fluctuation.
Fig 6.12 AFR Control Loop
Related Parameters
Setting the AFR Gain (n2-01)
Normally there is no need to change this setting. If adjustments are necessary, do the following:
• If hunting occurs increase n2-01.
• If the response is too low, decrease n2-01.
Adjust the setting by 0.05 at a time while checking the response.
Parameter
No.
Name
Factory
Setting
Change
during
Operation
Control Methods
V/f
Open
Loop
Vector
Closed
Loop
Vector
Closed
Loop
Vector
(PM)
n2-01 Speed feedback detection control (AFR) gain 1.00 No - A - -
n2-02 Speed feedback detection control (AFR) time constant 1 50 ms No - A - -
I
q
f
out
f
ref
 Loading...
Loading...






