6-38
6
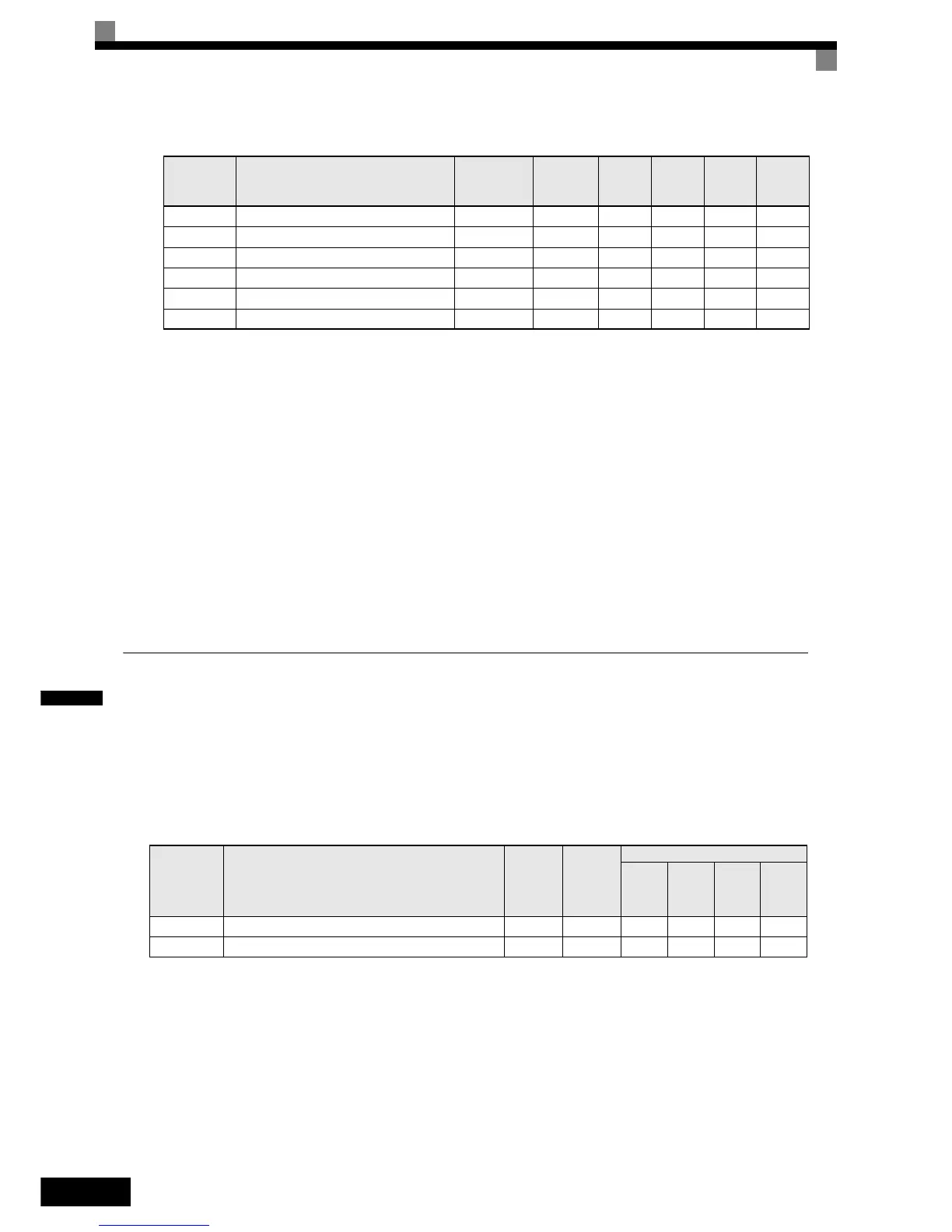
Related Parameters
Adjustments
The Slip compensation values can be set separately for motoring and regenerative operation. Before adjusting
this function the general setup should have been done (Motor Setup, V/f pattern, Speeds, ASR settings etc.).
To adjust the Slip compensation function do the following in motoring and regenerative mode:
• Set the motor speed in S2-01 if V/f control is used.
• Try to measure the actual motor speed during leveling.
• If the motor speed is lower than the leveling speed reference increase S2-02 in motoring mode or decrease
S2-03 in regenerative mode.
• If the motor speed is higher than the leveling speed reference decrease S2-02 in motoring mode or increase
S2-03 in regenerative mode.
• S2-05 and S2-06 should not be modified, except if the stop accuracy is poor and the constant speed time
after the speed agree is shorter than S2-05 + S2-06.
Field Forcing
The field forcing function controls the motor flux and compensates the flux establishment delay of the motor.
Thereby it improves the motor responsiveness to changes in the speed reference or the load.
Field forcing is applied during all operation conditions except DC Injection.
Using parameter d6-06 a field forcing limit can be applied. A setting of 100% is equal to the no-load current
set in parameter E2-03.
Related Parameters
Parameter
No.
Name
Factory
setting
Change
during
operation
V/f
Open
Loop
Vector
Closed
Loop
Vector
Closed
Loop
Vector
(PM)
S2-01 Motor Rated rpm 1380rpm No A - - -
S2-02 Slip Compensation Gain at Motoring 0.7 No A A - -
S2-03 Slip Compensation Gain at Regenerating 1.0 No A A - -
S3-05 Slip Compensation Torque Detection Delay 1.0 sec. No A A - -
S3-06 Slip Compensation Torque Detection Time 0.5 sec. No A A -
S2-07 Slip Compensation primary Delay Time 200ms No - A - -
Parameter
No.
Name
Factory
Setting
Change
during
Operation
Control Methods
V/f
Open
Loop
Vector
Closed
Loop
Vector
Closed
Loop
Vector
(PM)
d6-03 Field forcing selection 0 No - A A -
d6-06 Field forcing limit 400% No - A A -
 Loading...
Loading...






