!!!!
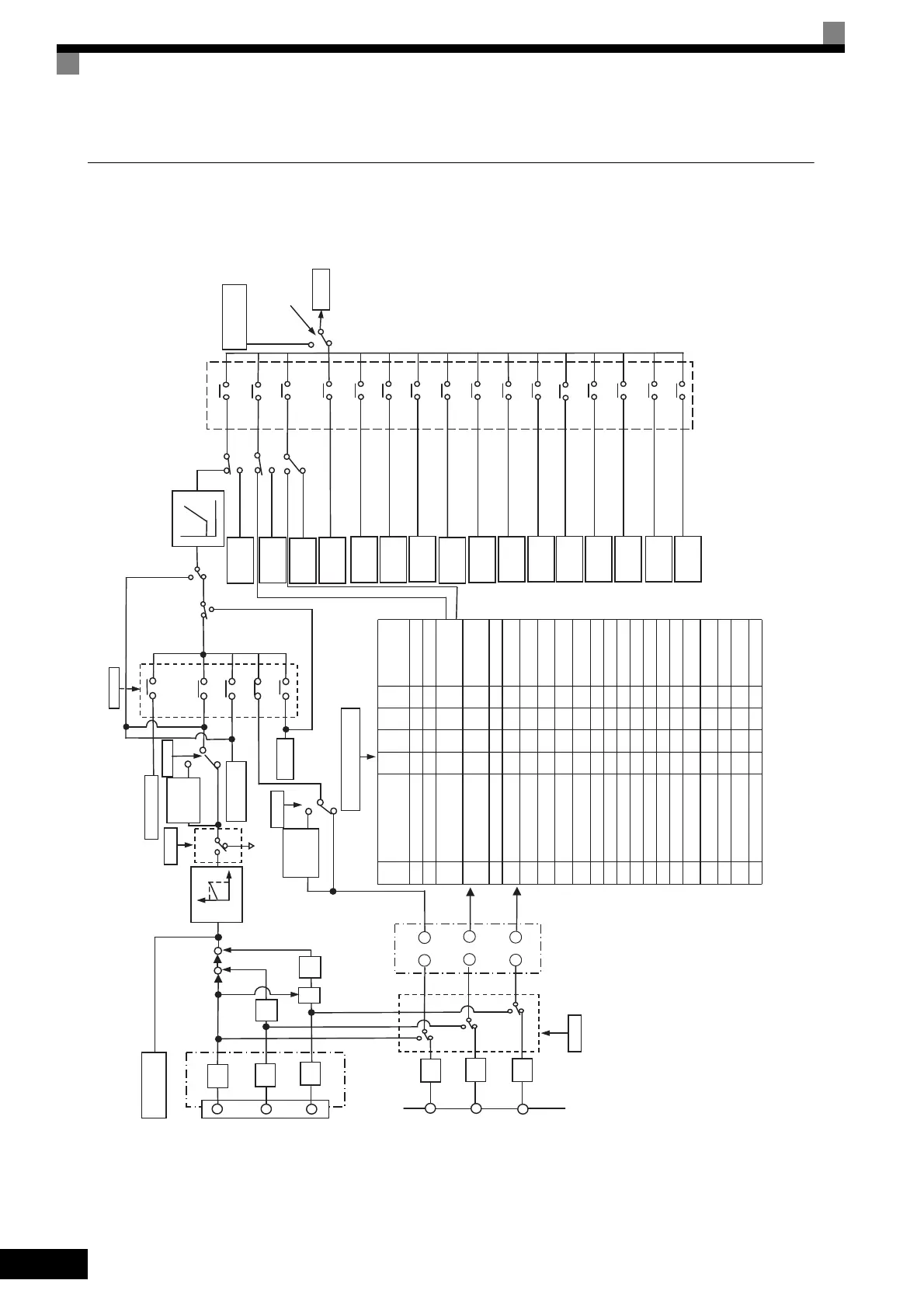
C option board
other than A1-14B
A1-14B
A/D
1/10
H3-02
H3-03
+
++
+
X 1/10
F2-01
L4-05
d1-01
H3-05 (Terminal A3) function
H3-09 (Terminal A2) function
L4-05
B1-01
Remote
d2-03
Master frequency
lower limit
Option
Multi-function
analog input is invalid.
When 2nd speed
analog is selected
When 3rd speed
analog is selected
Multi-function
analog input is invalid.
Multi-function
analog input is invalid.
Inverter
Local
Frequency
reference 1
(d1-01)
= 0
= 1
= 2
= 3
= 4
= 5
= 6
= 7
= 8
= 9
= 10
= 11
= 12
= 13
= 14
= 15
Muluti-step speed reference
Jog frequency
reference (d1-17)
When FJOG, RJOG (Jog
frequency reference) of
multi-function contact
input is input.
Frequency
reference
Frequency
reference 2
(d1-02)
Frequency
reference 3
(d1-03)
Frequency
reference 4
(d1-04)
Frequency
reference 5
(d1-05)
Frequency
reference 6
(d1-06)
Frequency
reference 7
(d1-07)
Frequency
reference 8
(d1-08)
Frequency
reference 9
(d1-09)
Frequency
reference
10
(d1-10)
Frequency
reference
11
(d1-11)
Frequency
reference
12
(d1-12)
Frequency
reference
13
(d1-13)
Frequency
reference
14
(d1-14)
Frequency
reference
15
(d1-15)
Frequency
reference
16
(d1-16)
=1
=4
=3
=2
=1
=0
=0
=1
=0
=1
=0
=1
=0
=1
=0
Pulse train input
Memobus
communication
= 1
= 0
Process when
frequency
refrence is
lost.
0V 10V
±13 bits
A/D
±13 bits
A/D
±13 bits
A/D
A
B
C
1
2
3
±11 bits
(See fig6.11)
A/D
±11 bits
A/D
±11 bits
Ch1
Ch2
Ch3
Terminal
A1
F2-01
Terminal
A2
Terminal
A3
Note:
AI input
If A1-14B is not mounted,
the same operation as when
F2-01=1 will be performed
regardless of the F2-01 setting.
Process when
frequency
refrence is
lost.
Set-
ting
Value
Function V/f
V/f
with
PG
Open
Loop
Vec-
tor
Flux
Vec-
tor
Input Level
01
02
03
Frequency gain
Auxiliary frequency
reference 1
(2nd step analog)
Auxiliary frequency
reference 2
(3rd step analog)
00 Yes Yes Yes YesAdd to terminal A1 ±100%/±10 V
04 Yes Yes No NoVoltage bias 100%/10 V
Yes Yes Yes Yes 100%/10 V
0A Jump frequency Yes Yes Yes Yes 100%/10 V
0B PID feedback Yes Yes Yes Yes ±100%/±10 V
0C PID target value Yes Yes Yes Yes ±100%/±10 V
0D Frequency baias 2 Yes Yes Yes Yes ±100%/±10 V
0E Motor temperature input Yes Yes Yes Yes ±100%/±10 V
11 Negative torque limit No No Yes Yes 100%/10 V
14 Torque compensation No No Yes Yes ±100%/±10 V
10 Positive toraue limit No No Yes Yes 100%/10 V
1F Analog input not used. Yes Yes Yes Yes
Yes Yes Yes Yes ±100%/±10 V
Yes Yes Yes Yes ±100%/±10 V
13
Torque refrence/torque
limit at speed control
No No No Yes ±100%/±10 V
15
Positive/negative torque
limit
No No Yes Yes 100%/10 V
05
Accel/decel change
(reduction coefficient)
Yes Yes Yes Yes 100%/1 V
06
DC injection
braking current
Yes Yes Yes No 100%/10 V
07
Overtorque/undertorque
detection level
Yes Yes Yes Yes 100%/10 V
08
Stall prevention level
during run
Yes Yes No No 100%/10 V
12
Regenerative torque
limit
No No Yes Yes 100%/10 V
09
Frequency reference
lower limit level
Yes Yes Yes Yes 100%/10 V
 Loading...
Loading...










