Adjusting Frequency References
6-
31
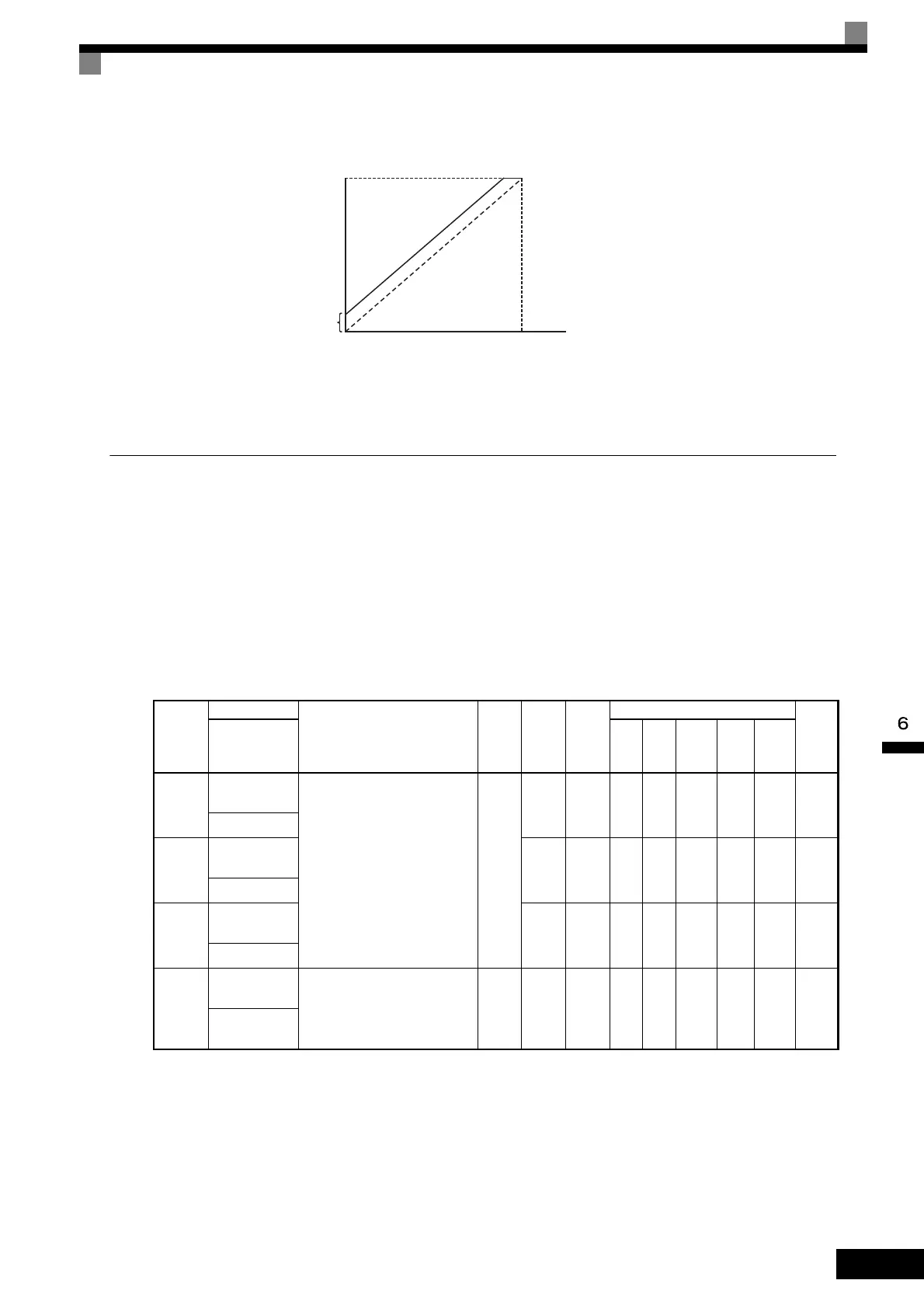
When constant H3-09 or H3-05 is set to D (frequency bias 2), the frequency equivalent to the terminal A2 or
A3 input voltage is added to A1 as a bias.
Operation Avoiding Resonance (Jump Frequency Function)
The jump frequency function operates the motor while avoiding resonance caused by characteristic frequen-
cies in the machinery.
This function is effective in creating a frequency reference dead band.
During constant-speed operation, operation within the jump frequency range is prohibited. Smooth operation
still used during acceleration and deceleration, i.e., jumps are not performed.
Related Constants
The relationship between the frequency reference and the jump frequency reference is as follows:
Con-
stant
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
Control Methods
MEMO
BUS
Regis-
ter
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vec-
tor
Open
Loop
Vector
2
d3-01
Jump fre-
quency 1
Set the center values of the jump
frequencies in Hz.
This function is disabled by set-
ting the jump frequency to 0 Hz.
Always ensure that the following
applies:
d3-01 ≥ d3-02 ≥ d3-03
Operation in the jump frequency
range is prohibited but during
acceleration and deceleration,
speed changes smoothly without
jump.
0.0 to
400.0
0.0 Hz No A A A A A 294H
Jump Freq 1
d3-02
Jump fre-
quency 2
0.0 Hz No A A A A A 295H
Jump Freq 2
d3-03
Jump fre-
quency 3
0.0 Hz No A A A A A 296H
Jump Freq 3
d3-04
Jump fre-
quency width
Sets the jump frequency band-
width in Hz.
The jump frequency will be the
jump frequency ± d3-04.
0.0 to
20.0
1.0 Hz No A A A A A 297H
Jump Band-
width
Terminal A1 input voltage
Frequency reference
H3-02
10%
Bias
0 V 10 V
TOE-S616-60.1.book 31 ページ 2017年8月4日 金曜日 午後3時41分
 Loading...
Loading...










