Individual Functions
6-
145
Feed Forward Control Structure
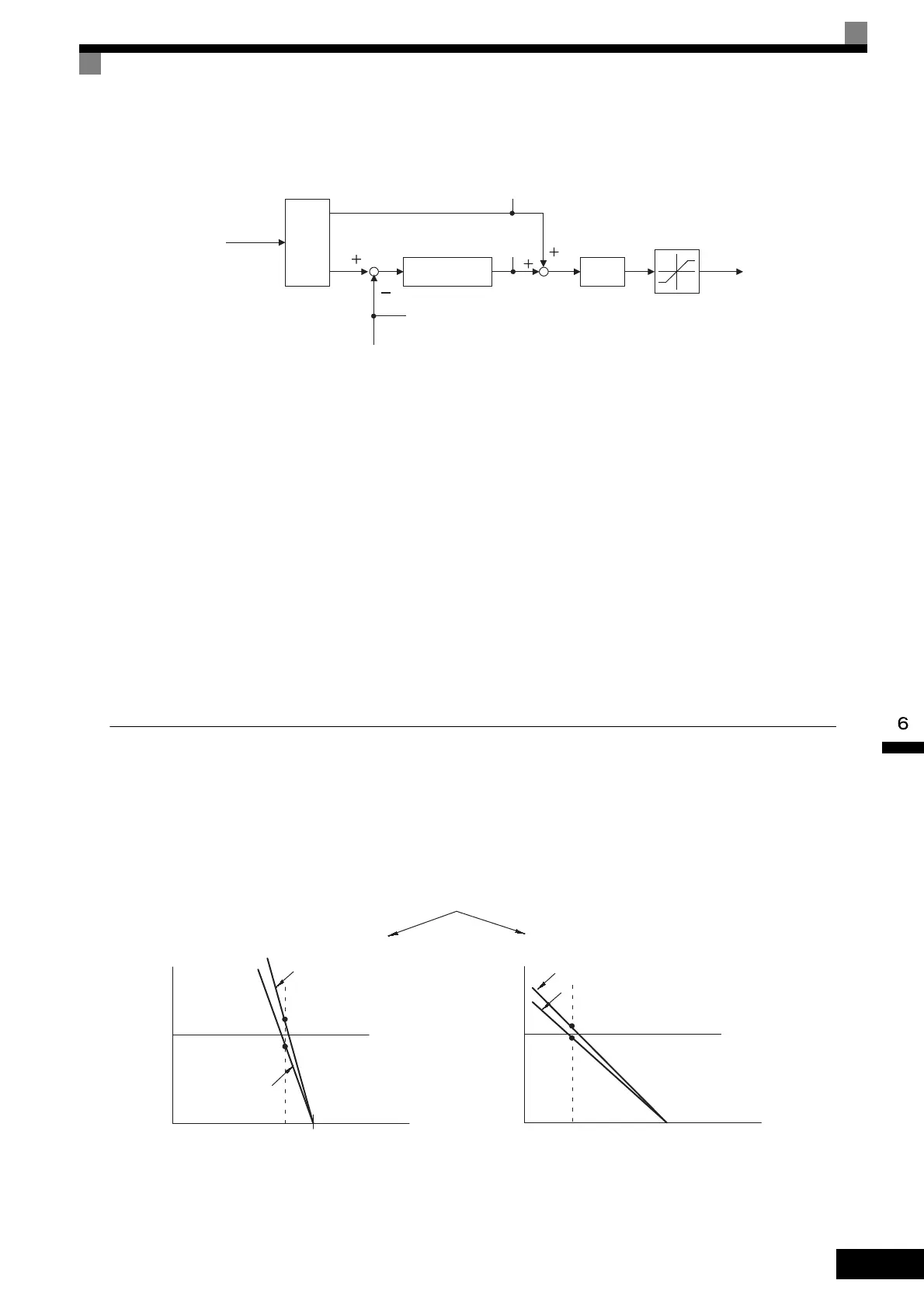
• The following block diagram shows the speed controller (ASR) and the feed forward control structure.
Fig 6.80 Structure of Speed Controller (ASR) and Feed Forward Control
Setting Precautions
• When N5-02 (Motor acceleration time) is not properly set, the acceleration time may not increase. The fac-
tory setting of N5-02 depends on the Inverter capacity. When the Inverter capacity is different from the
motor capacity, calculate an appropriate acceleration time using the equation given in N5-02 of Chapter 5
User Constants or set the time that corresponds to the motor capacity referring to Factory Settings that
Change with the Control Method (A1-02) (Page 5-90)
• When setting the feed forward proportional gain (N5-03), take the inertia of the motor to be equivalent to
1. If the speed reference response is slow, increase the feed forward proportional gain (N5-03). If over-
shoot occurs with the actual speed, or if a negative torque reference is output when acceleration is com-
pleted, reduce the feed forward proportional gain (N5-03).
• When using the droop control function (i.e., if b7-01 is not set to 0.0), disable feed forward control (i.e., set
N5-01 to 0).
Droop Control Function
Droop control is a function that allows the user to set the amount of motor slip.
When a single load is operated with two motors (such as in a crane conveyor), a high-resistance motor is nor-
mally used. This is to use torque characteristics that exhibit proportion movements due to changes in the sec-
ondary resistor to maintain torque balance with the load and overall speed balance with the load.
If droop control is used, a high-resistance motor characteristics can be set for a general-purpose motor.
Fig 6.81 Droop Control Function
C5-06
Frequency
reference
Feed
forward
controller
Detected speed
(Calculated speed)
Speed controller (ASR)
Primary
filter
(C5-10)
Torque limit
L7-01 to L7-04
Secondary
current
reference
N5-02, N5-03
U1-45
U1-44
U1-05
Motor A's torque
characteristics
T
A
T
B
Motor A's torque characteristics
T
A
T
B
Motor B's torque characteristics
Motor B's torque
characteristics
Load torqueLoad torque
Torque
The balance of the load is very different with different amounts of slip.
Torque
Reference
speed
Speed Reference
speed
Speed
Load balance when using a general-purpose motor Load balance when using a high-purpose motor
The difference between
T
A
and T
B
is getting larger.
The difference between
T
A
and T
B
is getting smaller.
TOE-S616-60.1.book 145 ページ 2017年8月4日 金曜日 午後3時41分
 Loading...
Loading...










