Setting up Compax3
C3I12T11
192-120113 N08 C3I12T11 - December 2010
4.4.3.2 Configuration
In this chapter you can read about:
Control path ................................................................................................................... 176
Motor parameters relevant for the control ...................................................................... 177
Mass inertia ................................................................................................................... 177
Nominal point data ........................................................................................................ 177
Saturation values ........................................................................................................... 179
Quality of different feedback systems ............................................................................ 179
Typical problems of a non optimized control .................................................................. 180
Feedback error compensation ....................................................................................... 181
Commutation settings .................................................................................................... 182
I²t - monitoring of the motor ........................................................................................... 182
Relevant application parameters ................................................................................... 185
Asynchronous motors .................................................................................................... 189
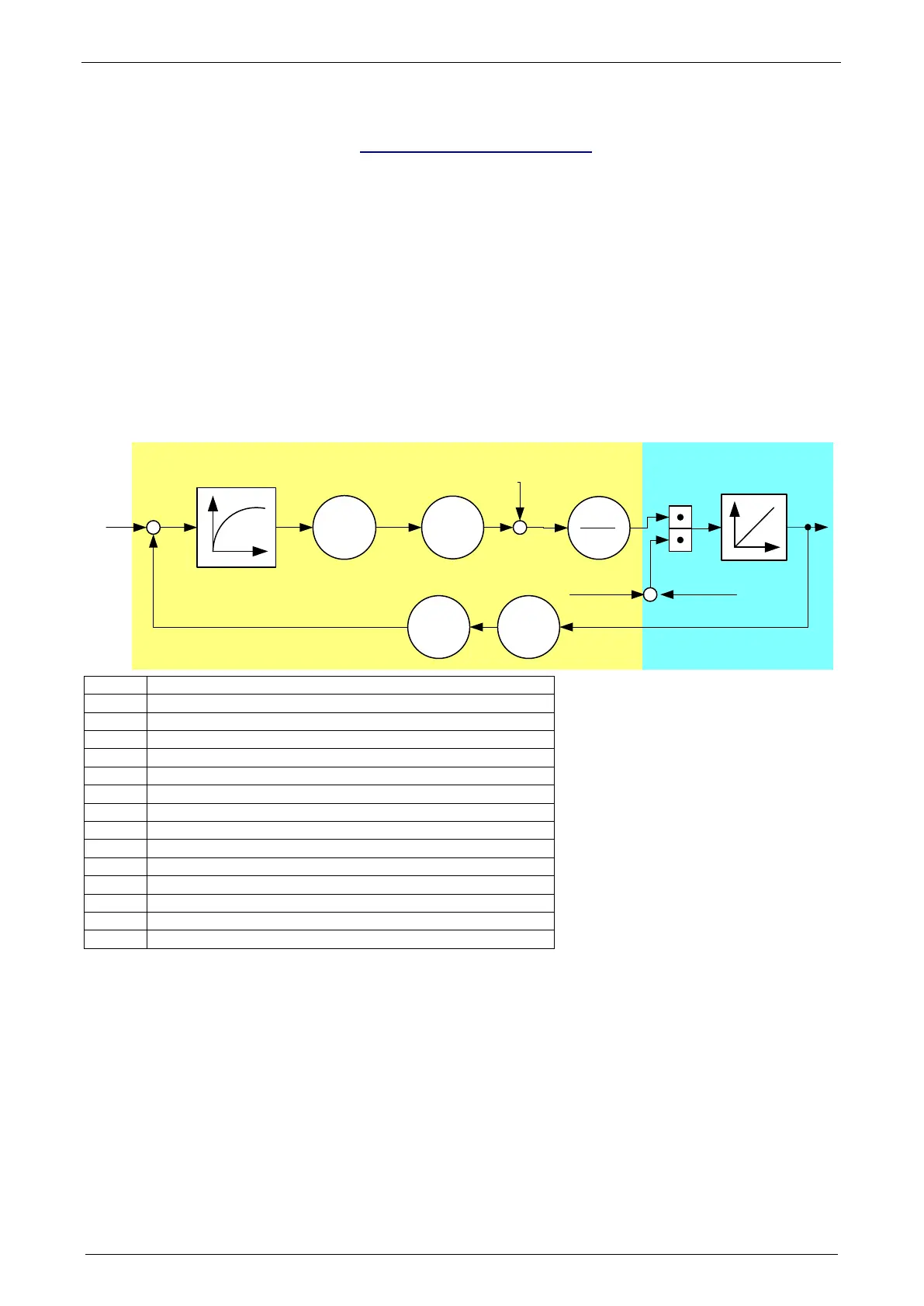
Control path
For the motors, the knowledge of the mathematical model is a prerequisite.
Mathematically idealized model of the control path:
J
Mot
J
Ext
a
J
ges
motor application
M
B
U: Control voltage
U
EMK
: electromagnetically generated voltage in the motor
T: electric time constant of the motor winding
L: Winding Inductance
R: Winding Resistance
M
A
: Drive torque of the motor
M
L
: Load torque
M
B
: Acceleration torque
I: Actual current r.m.s. (torque-producing)
K
T
: Torque constant
J
mot
: Motor mass moment of inertia
J
ext
: external mass moment of inertia
J
total
: Total mass moment of inertia
a: Acceleration
n: Velocity

 Loading...
Loading...









