Parker EME
Setting up Compax3
192-120113 N08 C3I12T11 - December 2010
Application:
for the analysis of the dynamic behavior of the mechanic system
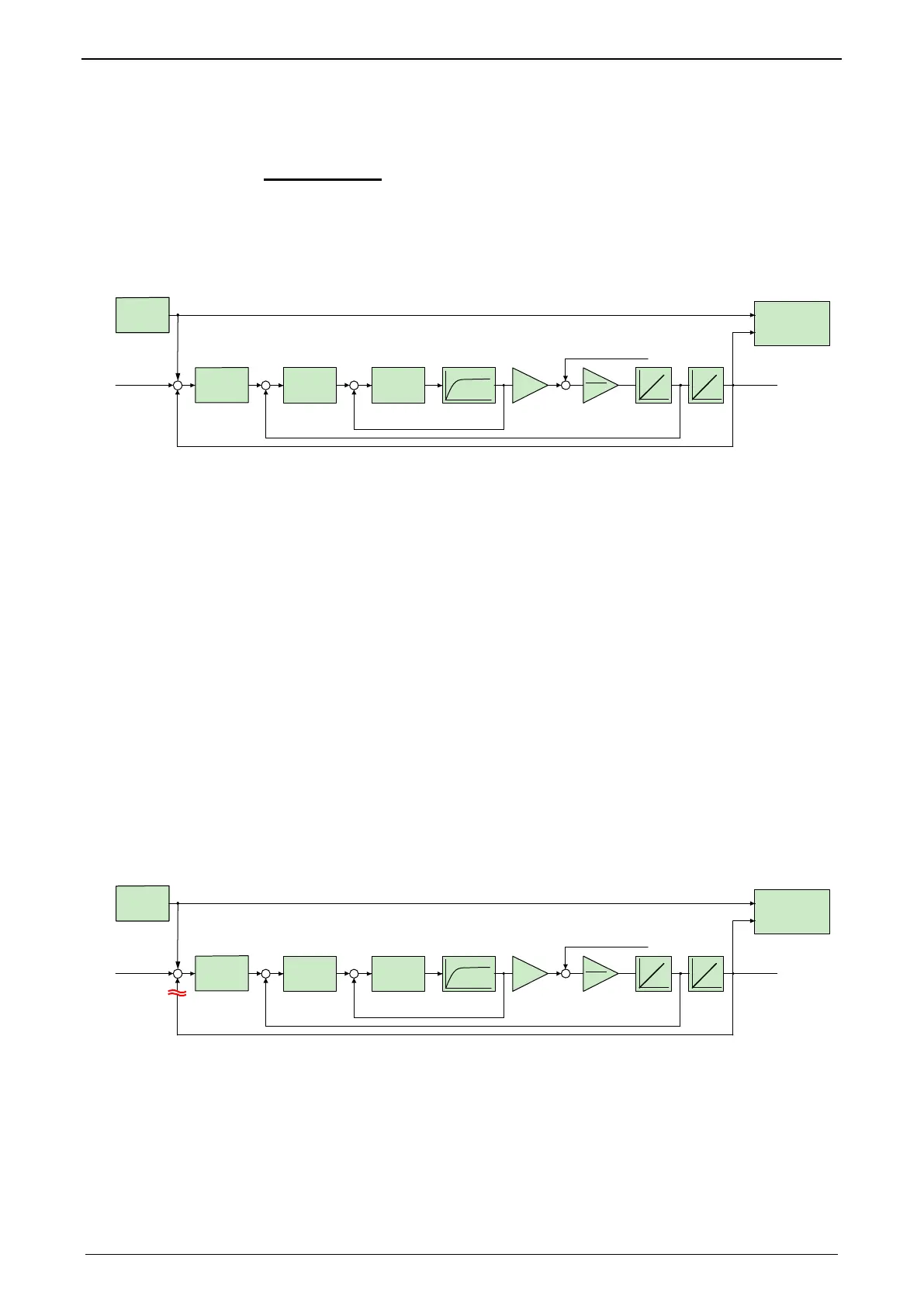
Position control
Closed position control
Shows the dynamic behavior of the closed position control.
=> How a signal on the position demand value is transmitted to the position actual
value.
current controlled
system
position
controlled
system
actual current
actual velocity
actual
position
actual position
desired
position
Position
controller
Velocity
controller
Current
controller
TeM
Frequency
response
measurement
Signal
generator
- - -
f: disturbance torque
Kt
2*Pi*J
1
velocity controlled
system
Signal
generator
Signal generator Signal Generator
Position controller Lageregler
actual position Lageistwert
desired position Lagesollwert
Velocity controller Geschwindigkeitsregler
actual velocity Geschwindigkeitsistwert
Current controller Stromregler
actual current Stromistwert
current controlled system Stromregelstrecke
f: disturbance torque Störmoment
velocity controlled system Geschwindigkeitsregelstrecke
position controlled system Lageregelstrecke
Frequency response measurement Frequenzgangmessung
Application:
For the design of superposed controllers or systems.
For the verification of the obtained controller speed during optimization
for the revision of the controller design of the position control
open position control
Shows the dynamic behavior of all components in the position control loop, but
without closing it.
current controlled
system
position
controlled
system
actual current
actual velocity
actual
position
actual position
desired
position
Position
controller
Velocity
controller
Current
controller
TeM
Frequency
response
measurement
Signal
generator
- - -
f: disturbance torque
Kt
2*Pi*J
1
velocity controlled
system
Signal
generator

 Loading...
Loading...









