13.9 Installation → Safety
• High when running, low when stopped: Output is low when the program state is “stopped”
or “paused” and high when it is running.
• Continuous Pulse: Output alternates between high and low for a specified number of
seconds, while the program is running. Pause or stop the program to maintain the pulse
state.
I/O Tab Control: Specify whether an output is controlled on the I/O tab (by either programmers, or
both operators and programmers), or if it is controlled by the robot programs.
13.9 Installation → Safety
See chapter 10.
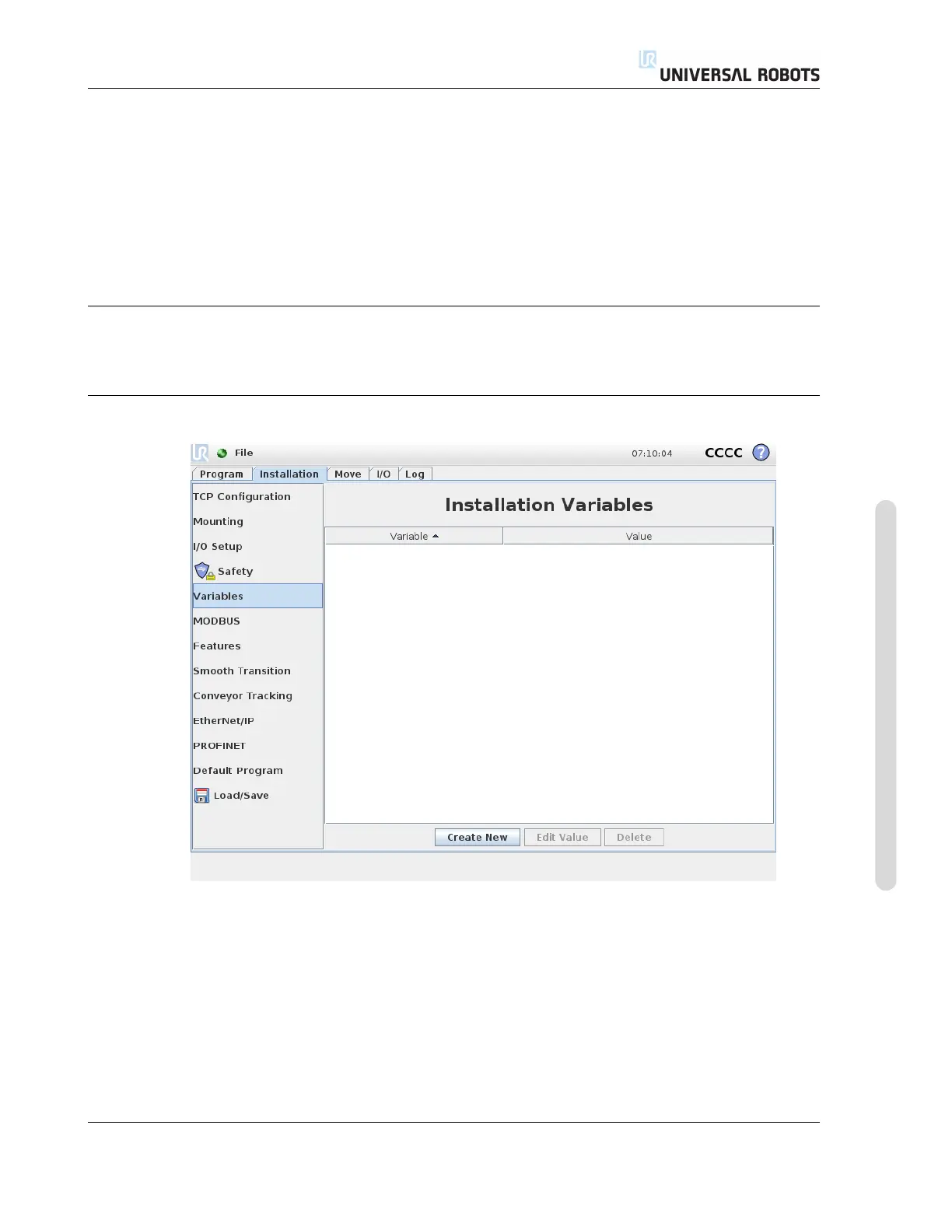
13.10 Installation → Variables
Variables created on the Variables screen are called Installation Variables and are used like normal
program variables. Installation Variables are distinct because they keep their value even if a pro-
gram stops and then starts again, and when the Robot arm and/or Control Box is powered down
and powered up again. Their names and values are stored with the installation, therefore it is
possible to use the same variable in multiple programs.
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
II-49 CB3

 Loading...
Loading...






